自适应滤波LMS与RLS的matlab实现.pdf
版权申诉
40 浏览量
2021-09-14
16:22:10
上传
评论
收藏 1.35MB PDF 举报

MATLAB 仿真实现 LMS 和 RLS 算法的二阶 AR 模型
及仿真结果分析
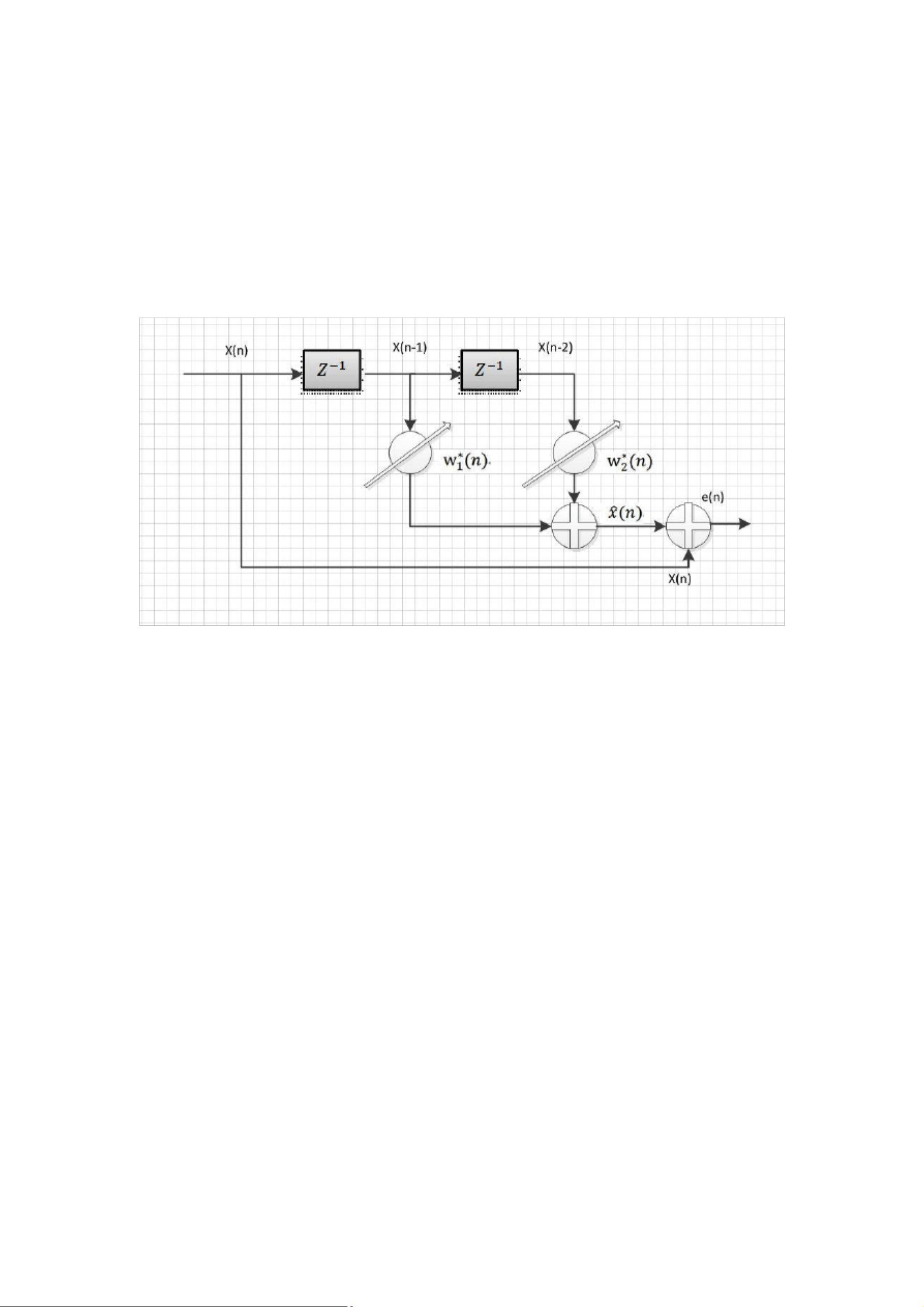
一、题目概述:二阶 AR 模型如图 1a 所示,可以如下差分方程表示:
x
(
n
)
v
(
n
)
a
1
x
(
n
1)
a
2
x
(
n
2)
v
(
n
)
d
(
n
)
(1)
图 1a
其中, v(n) 是均值 为 0 、方差 为 0.965 的高斯白噪声序 列。 𝑎
1
,𝑎
2
为描述性参数 ,
a
1
0.195,
a
2
0,95.
设 x(-1)=x(-2)=0,权值𝑤
1
(
0
)
= 𝑤
2
(
0
)
= 0, =0.04①推导最优
滤波权值(理论分析一下)。②按此参数设置,由计算机仿真模拟权值收敛曲线并画出,改
变步长在此模拟权值变化规律。③对仿真结果进行说明。④应用 RLS 算法再次模拟最优滤波
权值。
解答思路:
(1)高斯白噪声用 normrnd 函数产生均值为 0、方差为 0.965 的正态分布随机 1*N 矩
阵来实现。随后的产生的信号用题目中的二阶 AR 模型根据公式(1)产生,激励源是之前
产生的高斯白噪声。
(2)信号长度 N 取为 2000 点,用以观察滤波器权值变化从而估计滤波器系数,得到
其收敛值。
(3)仿真时分别仿真了单次 LMS 算法和 RLS 算法下的收敛性能以及 100 次取平均后
的 LMS 和 RLS 算法的收敛性能,以便更好的比较观察二者的特性。
( 4 ) 在 用 不 同 的 分 别 取 3 个 不 同 的 值 仿 真 LMS 算 法 时 , 值 分 别 取 为


剩余15页未读,继续阅读
资源评论













