卡尔曼滤波是一种最优估计技术.pdf
版权申诉
131 浏览量
2021-09-14
07:32:05
上传
评论
收藏 149KB PDF 举报

卡尔曼滤波是一种最优估计技术。工程中,为了了解工程对象(滤波中称为系统)的
各个物理量(滤波中称为状态)的确切数值,或为了达到对工程对象进行控制的目的,必须
利用测量手段对系统的各个状态进行测量。但是,测量值可能仅是系统的部分状态或是部分
状态的线性组合,且量测值中有随机误差(常称为量测噪声)。最优估计就是针对上述问题
的一种解决方法。最优估计能将仅与部分状态有关的测量进行处理,得出从某种统计意义上
讲误差最小的更多状态的估值。误差最小的标准常称为估计准则,根据不同的的估计准则和
估计计算方法,有各种不同的最优估计,卡尔曼滤波是一种递推线性最小方差估计。下图为
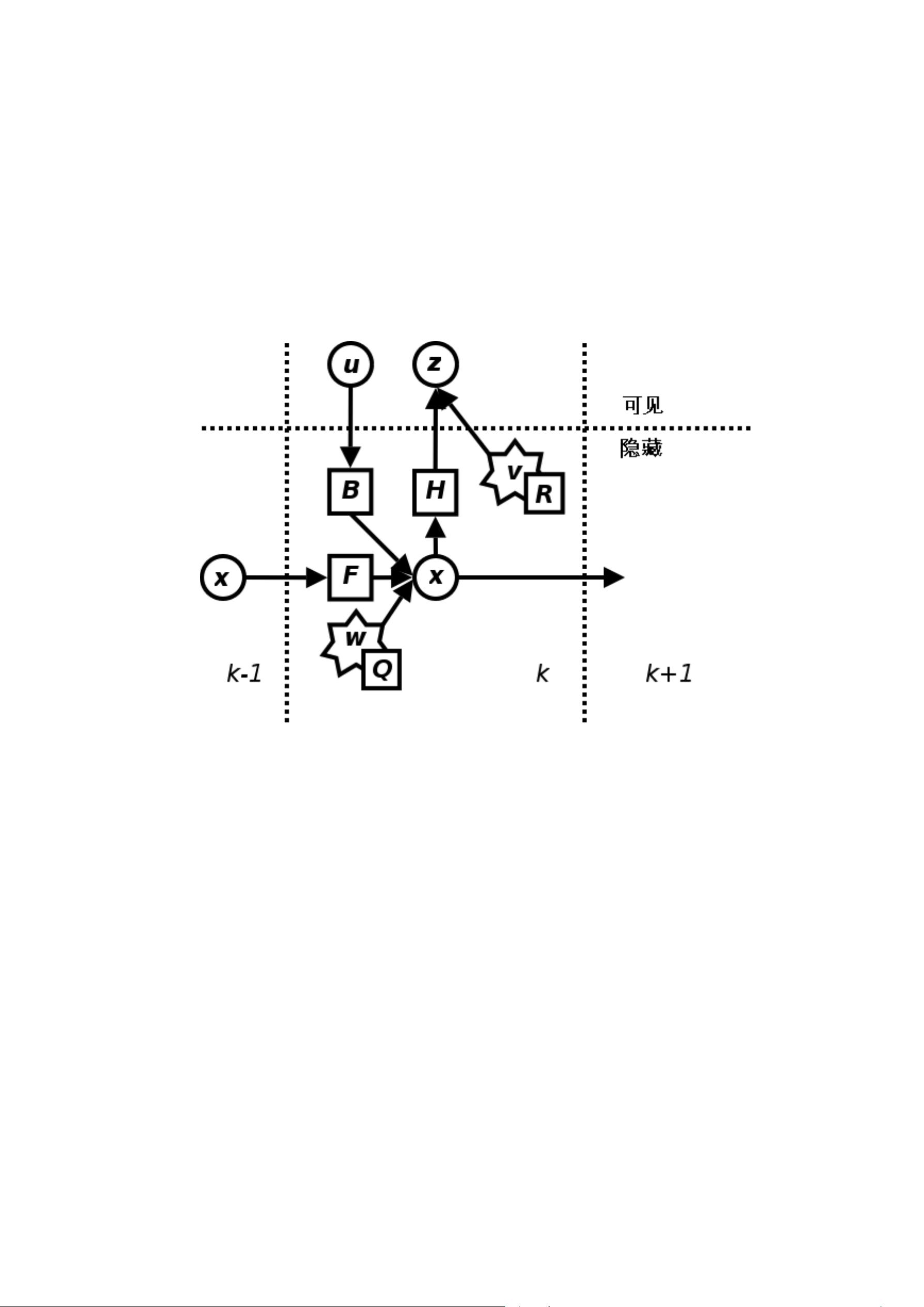
卡尔曼滤波器的模型,描述了各个变量之间的联系和在不同的时间步中所作的转化。
图 2-2 卡尔曼滤波器的模型
在图 2-2 中,圆圈代表向量,方块代表矩阵,星号代表高斯噪声,其协方差矩阵在右下
方标出
[1]
。
为了方便读者理解,引用一个例子解释卡尔曼滤波:
假设我们要研究的对象是一个房间的温度。根据你的经验判断,这个房间的温度是恒定
的,也就是下一分钟的温度等于现在这一分钟的温度(假设我们用一分钟来做时间单位)。
假设你对你的经验不是 100%的相信,可能会有上下偏差几度。我们把这些偏差看成是高斯
白噪声(White Gaussian Noise),也就是这些偏差跟前后时间是没有关系的而且符合高斯
分配(Gaussian Distribution)。
另外,我们在房间里放一个温度计,但是这个温度计也不准确的,测量值会比实际值偏
差。我们也把这些偏差看成是高斯白噪声。好了,现在对于某一分钟我们有两个有关于该房
间的温度值:你根据经验的预测值(系统的预测值)和温度计的值(测量值)。下面我们要
用这两个值结合他们各自的噪声来估算出房间的实际温度值。假如我们要估算 k 时刻的是实
际温度值。首先你要根据 k-1 时刻的温度值,来预测 k 时刻的温度。因为你相信温度是恒定
的,所以你会得到 k 时刻的温度预测值是跟 k-1 时刻一样的,假设是 23 度,同时该值的高
资源评论













