
A Driving Behavior Recognition Model with
Bi-LSTM and Multi-Scale CNN
He Zhang, Zhixiong Nan*, Tao Yang, Yifan Liu and Nanning Zheng
Abstract— In autonomous driving, perceiving the driving
behaviors of surrounding agents is important for the ego-vehicle
to make a reasonable decision. In this paper, we propose a
neural network model based on trajectories information for
driving behavior recognition. Unlike existing trajectory-based
methods that recognize the driving behavior using the hand-
crafted features or directly encoding the trajectory, our model
involves a Multi-Scale Convolutional Neural Network (MSCNN)
module to automatically extract the high-level features which
are supposed to encode the rich spatial and temporal infor-
mation. Given a trajectory sequence of an agent as the input,
firstly, the Bi-directional Long Short Term Memory (Bi-LSTM)
module and the MSCNN module respectively process the input,
generating two features, and then the two features are fused to
classify the behavior of the agent. We evaluate the proposed
model on the public BLVD dataset, achieving a satisfying
performance.
I. INTRODUCTION
Researches on understanding complex traffic scenarios
have recently been widely studied in the autonomous driv-
ing community [1]. When constructing a safe and reliable
autonomous driving system or Advanced Driver Assistance
System (ADAS), in order to analyze the dynamic evolution
of the traffic scene and then make a reasonable decision, it
is necessary to perceive the driving behavior of other agents
around the autonomous vehicle in real-time. For example,
sensing the braking behavior and the lane changing behavior
of vehicles in front of the autonomous vehicle is signifi-
cant for predicting possible dangerous events. Meanwhile,
accurate recognition of driving behavior can not only assist
path planning and motion decisions but also serve as high-
level semantics to assist trajectory prediction of vehicles or
pedestrians [2], [3]. In this paper, we focus on accurately
identifying interactive behavior in the traffic environment,
and the interactive behavior refers to the movement status
of surrounding traffic agents (vehicles, pedestrians, riders,
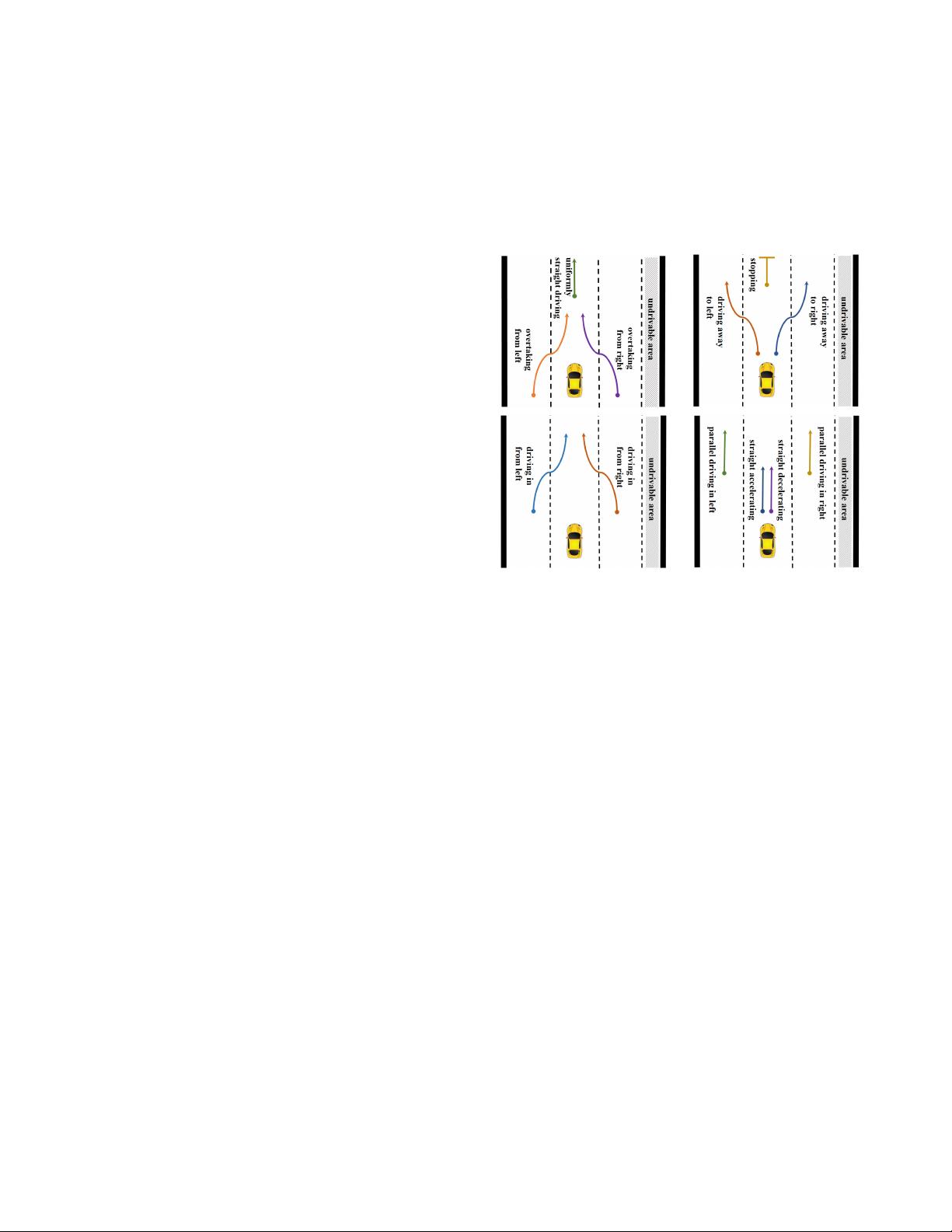
etc) relative to the ego-vehicle [4]. The driving behavior
categories of vehicles around the ego-vehicle are shown in
Fig. 1.
In the autonomous driving environment, the trajectory
sequence is considered as relatively reliable and valuable
information to model traffic agent behaviors. Due to the
complexity and dynamics of real traffic environments, it
is challenging to classify the driving behavior. The main
challenges are three-fold: 1) Generally, each kind of driving
event has different temporal durations. If we use a big
*Corresponding author: Zhixiong Nan nzx2018@xjtu.edu.cn
The authors are with the Institute of Artificial Intelligence and Robotics,
Xi’an Jiaotong University, Xi’an, China
Fig. 1. Driving behavior categories
window to split the trajectory into training samples, there
may exist multiple kinds of behaviors in a sample; 2) For
a fixed temporal window, the number and the behavior type
of agents around ego-vehicle are highly dynamic; 3) There
exists a severe imbalance in behavioral data, and the limited
training samples are available for most anomalous behavior
categories.
Recent progress in Lidar, GPS and visual vehicle de-
tection technologies allows collecting accurate and robust
trajectory data, which makes it possible to leverage data-
driven methods for driving behavior recognition task. Exist-
ing trajectory-based methods can be generally divided into
two types, one is to construct a classifier based on some
hand-crafted features [5]–[10], the other is to directly model
the trajectory sequence to obtain dynamic evolution rules,
and then implement the behavior classification [2], [3], [11].
However, there exist many drawbacks for both of them. The
former requires some domain knowledge to design manual
features and generally needs to select different features for
different datasets, leading to a lack of generalization across
different scenarios. The drawback of the latter is that the
original information included in trajectory points may be
insufficient, which may lead to the under-fitting of the model.
To overcome those drawbacks existing in the conventional
methods, we propose a neural network model to recognize
the driving behavior of surrounding agents. Unlike existing
trajectory-based methods that recognize the driving behavior
using the hand-crafted features or directly encoding the
arXiv:2103.00801v1 [cs.CV] 1 Mar 2021
资源评论


colin工作室
- 粉丝: 1107
- 资源: 388









最新资源
- 比libevent/libuv/asio更易用的国产网络库,用来开发 TCP/UDP/SSL/HTTP/WebSocket/MQTT 客户端/服务端
- 3-12.OpenCV基础.pptx
- 回文串:特殊对称字符串及其在计算机科学和多领域的广泛应用与研究进展
- 0软件工程-2024-2025-1实验要求.doc
- 帝可得智能售货机运营系统的体系设计框架 - 构建高效运营的技术解决方案
- ch-入口-通道-皮带程序
- pngquant压缩包
- 1949-2022中国人口历史数据.zip
- 软件工程各种图表.7z
- uniad部署.zipvsfdsfrr
- SoapUI-5.3.0免安装.zip
- 遥感目标检测(包含27种类型的遥感地物目标)
- 网络攻防原理与技术-提交的报告.7z
- NetWork-RSA.7z
- 西门子200SMART经程序,西门子经典参考程序,西门子程序模板,大概有50多个,都有中文注释的,覆盖内容广,学习用或者参考和借鉴程序把这些程序琢磨好,你也可以独当一面 以下展示部分: 200SMAR
- HL13:变频器资料:欧瑞变频器方案,资料齐全,原理图,pcb,源代码,文档 非常适合学习
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


