目 录
第 1 章绪 论.............................................................................................................................................. 4
1.1 引 言.................................................................................................................................................. 4
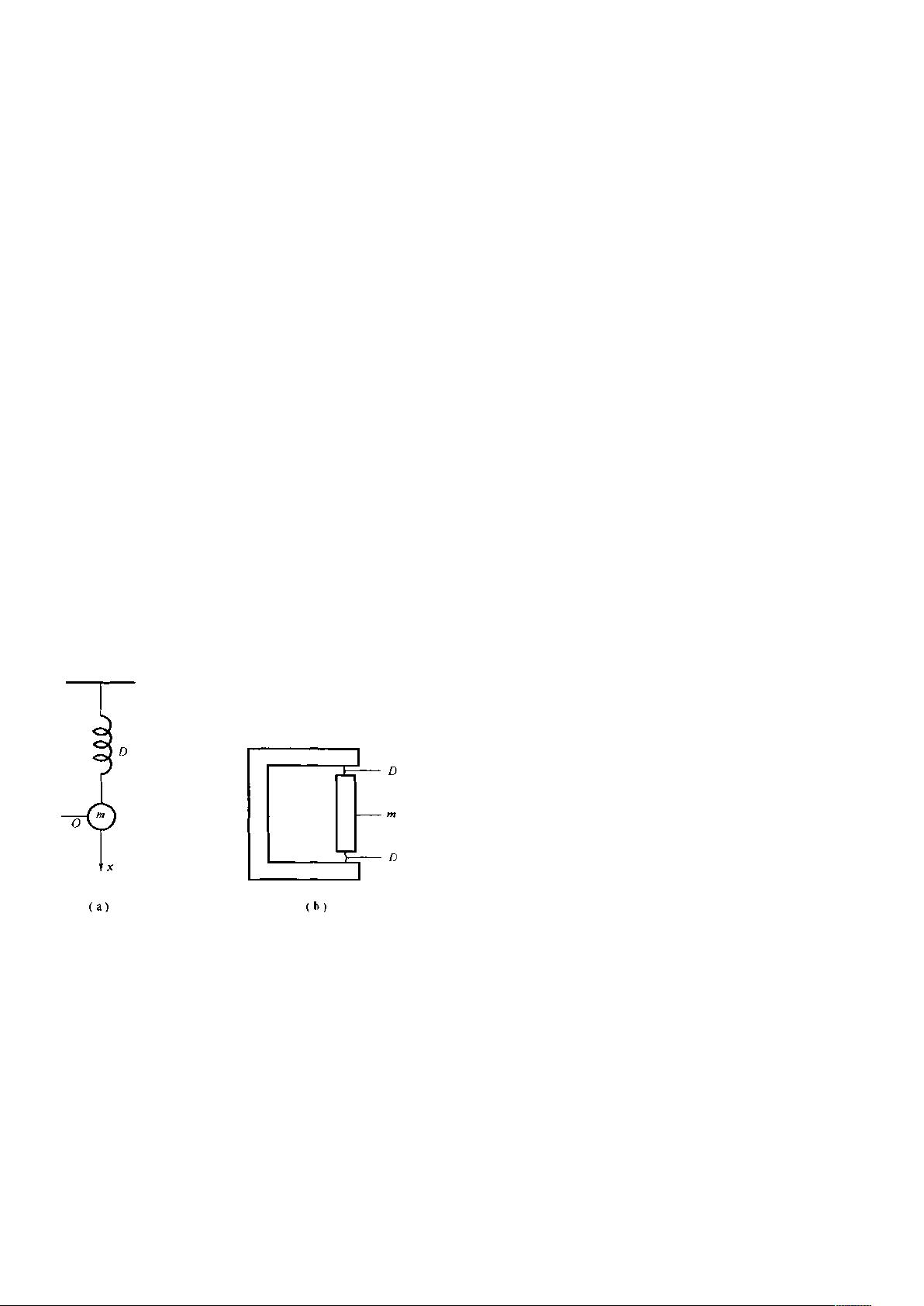
1.2 机械振动............................................................................................................................................ 2
1.3 声波的基本概念................................................................................................................................... 5
1.4 声学欧姆定律...................................................................................................................................... 6
1.5 矢量声学基础概念................................................................................................................................ 7
1.6 声呐系统及声信道模型....................................................................................................................... 20
1.7 声呐方程.......................................................................................................................................... 12
第 2 章平均能量信道................................................................................................................................ 27
2.1 海水中的声速度................................................................................................................................. 27
2.2 海水中的声吸收................................................................................................................................. 19
2.3 海洋环境噪声.................................................................................................................................... 21
2.4 海底反射损失.................................................................................................................................... 23
2.5 分层介质射线声学.............................................................................................................................. 24
2.6 等梯度水层中的声线和声场................................................................................................................. 27
2.7 深海声传播方式与扩展损失................................................................................................................. 29
2.8 浅海的 Pekeries 模型......................................................................................................................... 31
第 3 章相干多途信道................................................................................................................................ 50
3.1 相干多途信道的系统函数.................................................................................................................... 50
3.2 相关器和匹配滤波器........................................................................................................................... 43
3.3 信号模糊度函数................................................................................................................................. 47
a(t)
"T^
rect
(T
r
) ^.......................................................................................................49
3.4 拷贝相关器在相干多途信道中的响应.....................................................................................................50
3.5 自适应相关器.................................................................................................................................... 51
3.6 自适应相关器在相干多途信道中的响应..................................................................................................53
3.7 相干多途信道中的互相关.................................................................................................................... 55
3.8 简正波垂直过滤抗近场干扰
[9]
...............................................................................................................57
3.9 低频近程声场的干涉结构.................................................................................................................... 68
3.10 声压时间反转镜............................................................................................................................... 72
3.11 矢量时间反转镜............................................................................................................................... 75
其中〜(
t
)是本地干扰的噪声分量,*表示卷积运算。..............................................75
其中'(«,/〇表示 Mu,
fe
)与\([,「。人)的相关函数,...........................................76
3lii...................................................................................................................................... 76
第 4 章随机时变空变信道理论基础.............................................................................................................79
4.1 随机声场的一般概念和描述.................................................................................................................79
4.2 声信号起伏....................................................................................................................................... 82
4.3 时变信道的系统函数........................................................................................................................... 83
4.4 随机时变信道的系统函数.................................................................................................................... 86
4.6 广义平稳非相关散射信道(WSSUS 信道)............................................................................................87
4.7 散射函数.......................................................................................................................................... 88
4.8 相干函数.......................................................................................................................................... 91
4.9 基阵的指向性函数.............................................................................................................................. 92
4.10 随机空变信道..................................................................................................................................92
4.11 被动声呐的物理模型......................................................................................................................... 94
P(f,u) = JJ/? (t-,Ax)e-„
i2,t(A+,
*
A
*
)
drd(A
a:
) (4.86)...........................................................95
4.12 直线阵在随机空变信道中的响应......................................................................................................... 96
第 5 章缓慢时变的相干多途信道..............................................................................................................116
5.1 散射函数的实验结果......................................................................................................................... 116
5.2 信道相干性的测量方法一脉间相关法...................................................................................................108