TMC5160数据手册(英文带书签)

需积分: 0 150 浏览量
更新于2022-11-01
收藏 3.95MB PDF 举报
《TMC5160数据手册》是针对一种高级步进电机控制器和驱动集成电路的详细介绍。该芯片由TRINAMIC Motion Control GmbH & Co. KG制造,专为高动态、高扭矩电机驱动设计,适用于多种工业和自动化应用,如机器人、纺织机械、包装机械、3D打印机等。
TMC5160的主要特点包括:
1. **2相步进电机驱动**:支持1至十几安培的线圈电流,适用于不同规模的电机应用。
2. **六点运动控制器**(SixPoint™ ramp):提供自动目标定位的灵活斜坡生成,确保精准运动控制。
3. **步进/方向接口**:带有微步插补功能,允许更精细的电机定位。
4. **MicroPlyer™**:电压范围从8到60V DC,扩展了工作电压的适应性。
5. **SPI与单线UART接口**:提供串行通信能力,简化系统集成。
6. **编码器接口与双参考开关输入**:增强反馈机制,提高运动精度。
7. **最高分辨率256微步/全步**:实现超精细的运动控制。
8. **StealthChop2™**:静音运行技术,确保电机运动平稳且无噪音。
9. **共振抑制**:针对中频共振进行有效抑制,提升电机性能。
10. **SpreadCycle™**:高度动态的电机控制斩波器,提高响应速度。
11. **DcStep™**:负载依赖速度控制,根据负载条件自动调整速度。
12. **StallGuard2™**:高精度无传感器电机负载检测,可防止电机堵转。
13. **CoolStep™**:节能电流控制,最多可节省75%的能源。
14. **被动刹车与自由轮模式**:保护电机并减少能量损失。
15. **全面的保护与诊断功能**:保障系统安全稳定运行。
16. **紧凑尺寸**:采用7x7mm² TQFP48封装或8x8mm² QFN封装,适合小型化设计。
TMC5160的这些特性使其在各种需要精密运动控制的场合表现出色,特别是在需要静音操作、高效能和最佳电机扭矩的场合。其高集成度和小体积设计使得系统更加小巧,同时降低了成本,而丰富的接口和保护功能则降低了学习曲线,提高了系统的整体性能。
在实际应用中,结合STM32这样的微控制器,可以构建出高效、智能的步进电机控制系统。STM32作为一款强大的32位微控制器,拥有丰富的外设接口和处理能力,能够很好地与TMC5160配合,实现对电机的精确控制和实时监控。
TMC5160是现代步进电机驱动设计中的一款先进芯片,它结合了先进的驱动技术和创新的控制算法,能够在多个领域提供高效、静音且节能的电机运动解决方案。
POWER DRIVER FOR STEPPER MOTORS INTEGRATED CIRCUITS
TRINAMIC Motion Control GmbH & Co. KG
Hamburg, Germany
TMC5160 / TMC5160A DATASHEET
FEATURES AND BENEFITS
2-phase stepper motors from 1 to several 10A coil current
Motion Controller with SixPoint™
ramp
Step/Dir Interface with microstep interpolation MicroPlyer™
Voltage Range 8 … 60V DC
SPI & Single Wire UART
Encoder Interface and 2x Ref.-Switch Input
Highest Resolution 256 microsteps per full step
StealthChop2™ for quiet operation and smooth motion
Resonance Dampening for mid-range resonances
SpreadCycle™ highly dynamic motor control chopper
DcStep™ load dependent speed control
StallGuard2™ high precision sensorless motor load detection
CoolStep™ current control for energy savings up to 75%
Passive Braking and freewheeling mode
Full Protection & Diagnostics
Compact Size 7x7mm
2
(body) TQFP48 package / 8x8mm² QFN
APPLICATIONS
Robotics & Industrial Drives
Textile, Sewing Machines
Packing Machines
Factory & Lab Automation
High-speed 3D Printers
Liquid Handling
Medical
Office Automation
CCTV
ATM, Cash Recycler
Pumps and Valves
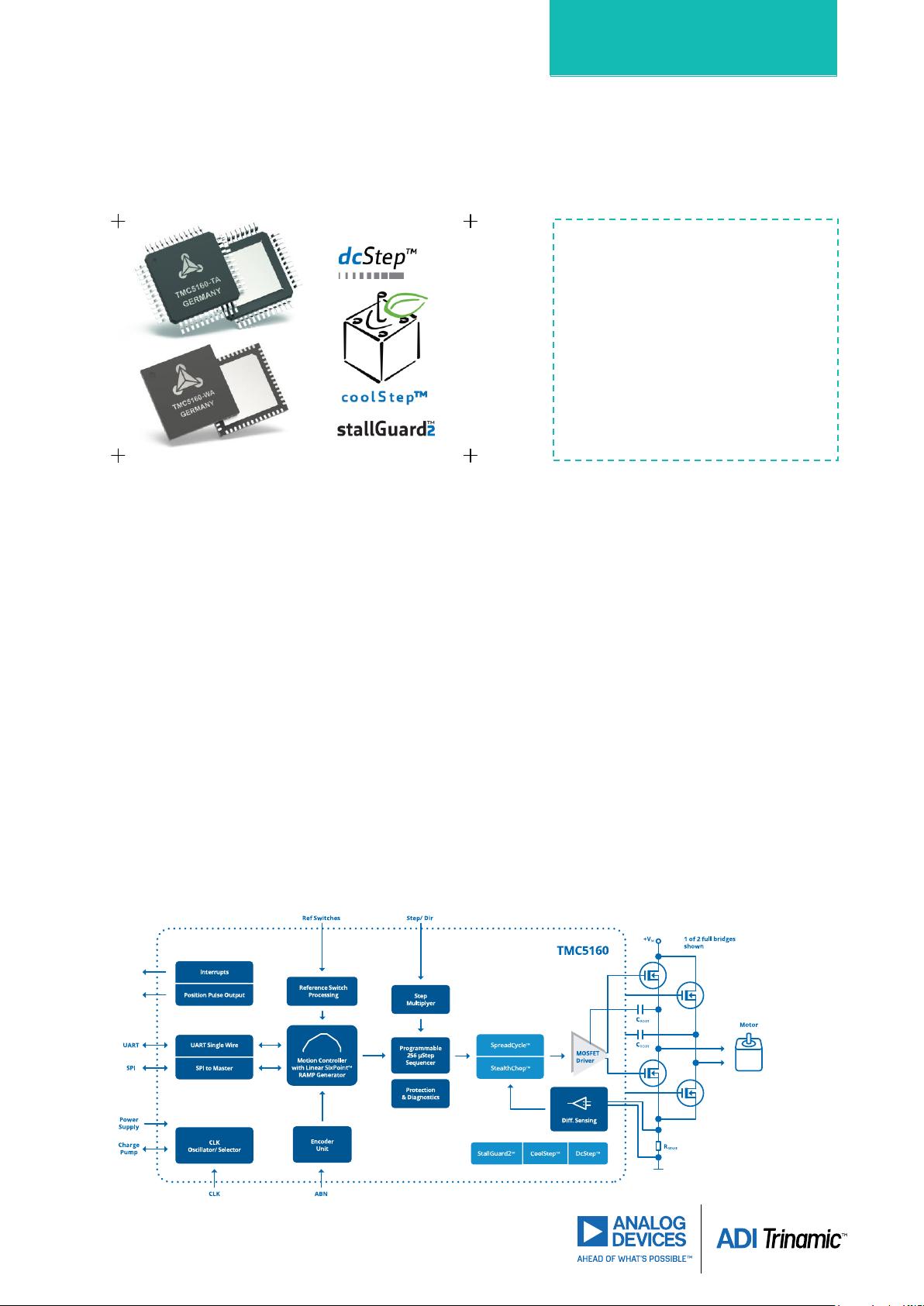
DESCRIPTION
The TMC5160 / TMC5160A is a high-power
stepper motor controller and driver IC
with serial communication interfaces. It
combines a flexible ramp generator for
automatic target positioning with indus-
tries’ most advanced stepper motor
driver. Using external transistors, highly
dynamic, high torque drives can be
realized. Based on TRINAMICs sophisti-
cated SpreadCycle and StealthChop
choppers, the driver ensures absolutely
noiseless operation combined with maxi-
mum efficiency and best motor torque.
High integration, high energy efficiency
and a small form factor enable miniatu-
rized and scalable systems for cost
effective solutions. The complete solution
reduces learning curve to a minimum
while giving best performance in class.
Universal high voltage controller/driver for two-phase bipolar stepper motor. StealthChop™ for quiet
movement. External MOSFETs for 1A to several 10A coil current. With Step/Dir Interface and SPI.
BLOCK DIAGRAM

剩余133页未读,继续阅读
181 浏览量
158 浏览量
146 浏览量
190 浏览量
2020-03-24 上传
138 浏览量
2024-11-18 上传
2023-11-20 上传
134 浏览量
182 浏览量
资源评论



cat_milk
- 粉丝: 138
- 资源: 8









最新资源
- 基于Springboot+Vue学生网上选课系统的设计-毕业源码案例设计(高分项目).zip
- 基于Springboot+Vue医疗报销系统的设计与实现-毕业源码案例设计(95分以上).zip
- 风储模型中,功率分配模型
- FPGA Mipi协议采集解码工程,可以接收ov5640摄像头数据,也可以移植到其他的CSI摄像头中
- 基于方程的comsol气泡空化模型,参考文献如图
- linux常用命令大全常用.txt
- linux常用命令大全常用.txt
- linux常用命令大全常用.txt
- Halcon联和C#做的运动控制加视觉定位小案例,板卡用的是正运动的ECI1408,,支持建模和标定的保存和加载,此案例非常适合想学运动控制视觉定位的人学习
- frpc-darwin-arm64
- 异步电机直接转矩控制算法模型正常运行R2016b版本及以上均可运
- comsol空芯反谐振光纤spr
- 网络加速器,加速访问huggingface+GitHub
- 基于matlab的交流电机动态方程,用于交流电机动态分析 输入电机的额定功率(kW)、电机的额定转速(r min)、转子外径(m)、铁心长(m)转子槽数、电机极对数 等参数,输出转速变化、力矩变
- ChatTTS是一种专门为LLM助手等对话场景设计的文本到语音模型
- 01超级染色体小游戏源码.zip
