





2020年5月12日
自動走行ビジネス検討会
自動走行ビジネス検討会
「自動走行の実現に向けた取組報告と方針」
報告書概要
Version4.0
※ 新型コロナウイルスの感染拡大等の影響により、本報告書に記載のイベントの開催時期等については変更の可能性がある。
「自動走行ビジネス検討会」は、自動走行のビジネス化を産学官のオールジャパン体制で推進するため、2015年2月に、経産省製造
産業局長と国交省自動車局長の主催で、自動車メーカー、サプライヤー、有識者の参加を得て設置。
2015、2016年度に、①一般車両の自動走行(レベル2、3、4)等の将来像の明確化、②協調領域の特定、③国際的なルール
(基準、標準)づくりに戦略的に対応する体制の整備、④産学連携の促進に向けた議論を行い、「自動走行の実現に向けた取組
方針」(2017年3月)を提示。2017年度は、当該取組方針に基づく取組の推進及びその進捗管理を行うとともに、これまでの研究
開発の成果を活用した安全性の評価方法の在り方等について検討し、「自動走行の実現に向けた取組方針Version2.0」(2018
年3月)を提示。2018年度も、当該取組方針に基づく取組の推進及びその進捗管理を行うとともに、安全性の評価方法の在り方、
人材育成・確保に係る検討等を実施し、 「自動走行の実現に向けた取組方針Version3.0」(2019年6月)を提示。
2019年度も当該取組方針で見直した工程表に基づく取組の推進及びその進捗管理を行うとともに、国内外の実証事業の状況や
官民の事業化の目標を踏まえ、無人自動運転サービスの実現・普及に向けたロードマップについて検討を行った。
自動走行ビジネス検討会について
自動走行レベルの定義(JASO TP-18004(2018年2月1日発行))
レベル 概要 操縦※1の主体
運転者が一部又は全ての動的運転タスクを実行
レベル0
運転自動化なし
• 運転者が全ての運転タスクを実施 運転者
レベル1
運転支援
• システムが縦方向又は横方向のいずれかの車両運転制御のサブタスクを限定領域において実行 運転者
レベル2
部分運転自動化
• システムが縦方向及び横方向両方の車両運転制御のサブタスクを限定領域において実行 運転者
自動運転システムが(作動時は)全ての動的運転タスクを実施
レベル3
条件付運転自動化
• システムが全ての動的運転タスクを限定領域において実行
• 作動継続が困難な場合は、システムの介入要求等に適切に応答
システム
(作動継続が困難な場合は運転者)
レベル4
高度運転自動化
• システムが全ての動的運転タスク及び作動継続が困難な場合への応答を限定領域において実行 システム
レベル5
完全運転自動化
• システムが全ての動的運転タスク及び作動継続が困難な場合への応答を無制限に(すなわち、限定領
域内ではない)実行
システム
※1 ここでの「領域」は、必ずしも地理的な領域に限らず、環境、交通状況、速度、時間的な条件などを含む。「操縦」は、認知、予測、判断及び操作の行為を行うこと。
※2 SAE International J3016(2016)における“User”の意で、運転者を含む。
1
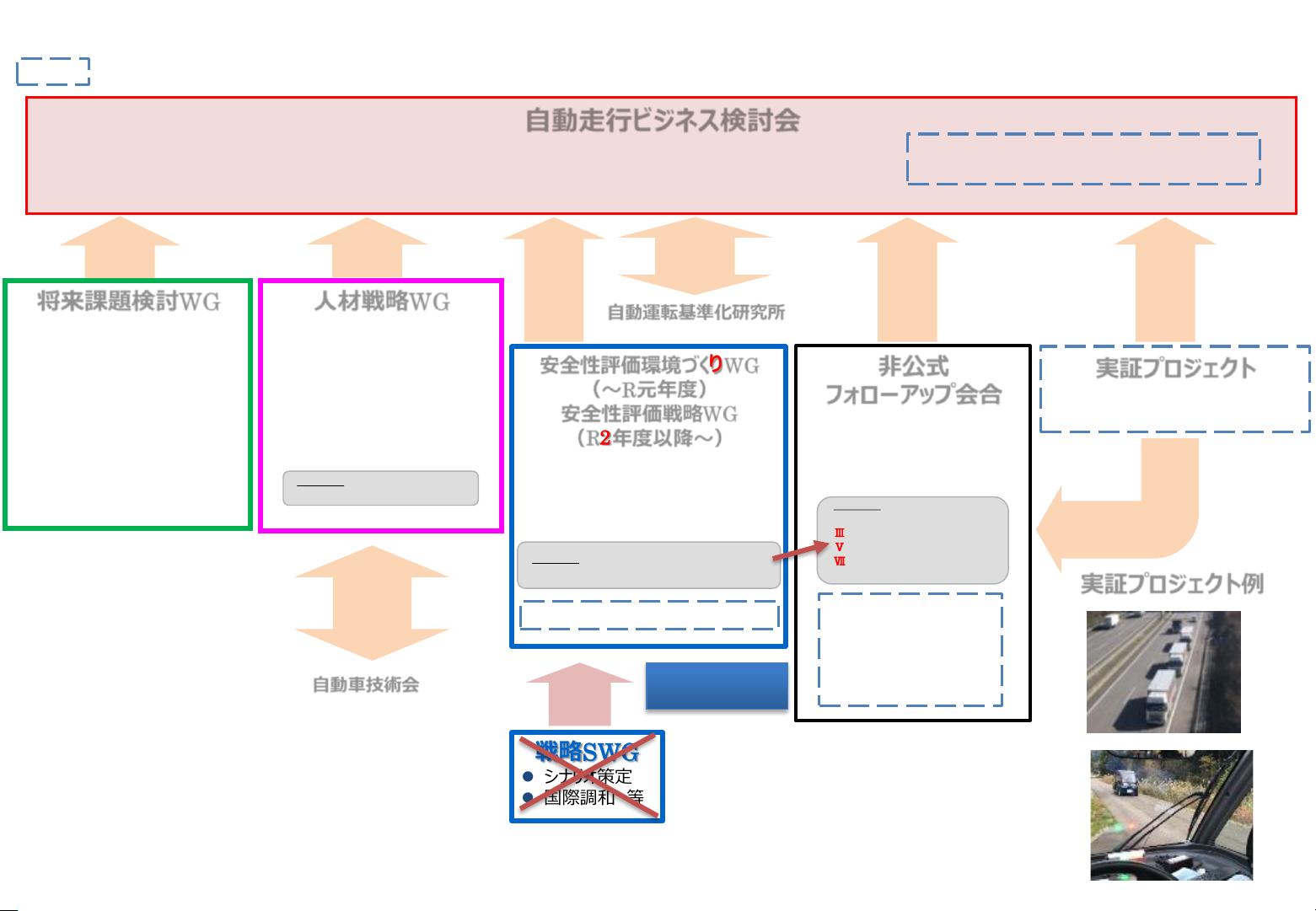
<参考>令和元年度自動走行ビジネス検討会「Connected Industries 自動走行分科会」検討体制・取組内容
安全性評価環境づくりWG
(~R元年度)
安全性評価戦略WG
(R2年度以降~)
自動運転の車両安全に関する
基準・標準を見据えた評価方法
の検討、シナリオ検討、国際調
和 等
安全性評価技術構築等(JARI)
自動走行ビジネス検討会
「自動走行の実現に向けた取組方針」策定
将来像検討、協調領域重要10分野進歩管理、見直し
実証プロジェクト 等
非公式
フォローアップ会合
取組方針に基づく検討・取
組が、着実に進展するよう、
特に検討領域における進
捗等を確認 等
責任論・受容性研究
(テクノバ)
• 法的論点整理
• サポカー普及促進
• 消費者意識調査
• シンポジウム 等
報告
実証プロジェクト
トラック隊列走行実証実験(豊田通商)
ラストマイル自動走行実証(AIST)
人材戦略WG
トップAI人材引き込み・育成
基盤となるマス人材での自
動車業界×ITの人材エコシ
ステム構築を目指し、自動
走行に関わる人材の確保・
育成・発掘 等
R1FY 高度な自動走行システムの社会実装に向けた研究開発・実証事業
各種検討・会議運営・成果報告(ATK)
※下部WG、非公式フォローアップ会合の運営含む
将来課題検討WG
無人自動運転サービスの実
現・普及に向けた導入ロード
マップやその実現のために必
要な制度やインフラを含めた
環境整備等に関わる課題・
論点について検討 等
検討領域
Ⅹ.安全性評価
検討領域
Ⅷ.ソフトウェア人材
検討領域
Ⅰ.地図、Ⅱ.通信インフラ、
Ⅲ.Ⅳ.認識・判断技術、
Ⅴ.人間工学、Ⅵ.セーフティ、
Ⅶ.サイバーセキュリティ、
Ⅸ.社会受容性
自動運転基準化研究所
報告
報告
自動車技術会
自動運転AIチャレンジ
情報共有
情報共有
トラック隊列走行実証
実証プロジェクト例
報告
報告
情報共有
変更予定
戦略SWG
シナリオ策定
国際調和 等
繰り上げ
(R2年度以降)
2
委員
(敬称略、五十音順、下線:座長)
オブザーバー
関係省庁
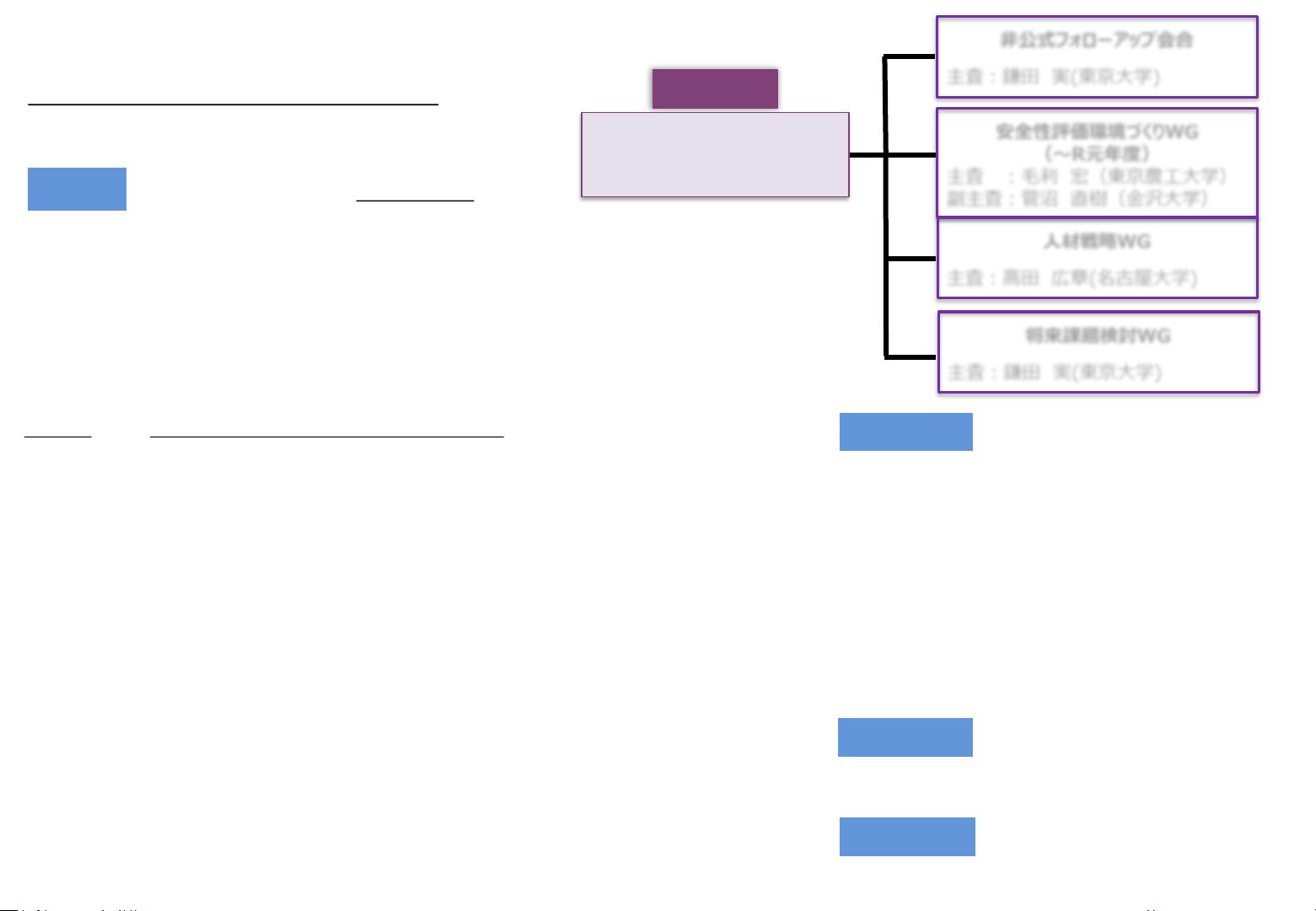
検討体制
自動走行ビジネス検討会
座長:鎌田実(東京大学)
非公式フォローアップ会合
主査:鎌田 実(東京大学)
安全性評価環境づくりWG
(~R元年度)
主査 :毛利 宏(東京農工大学)
副主査:菅沼 直樹(金沢大学)
人材戦略WG
主査:高田 広章(名古屋大学)
将来課題検討WG
主査:鎌田 実(東京大学)
(2020年3月時点)
<参考>委員等名簿・検討体制
3
SBドライブ株式会社(※)
株式会社ZMP(※)
株式会社ティアフォー(※)
一般社団法人電子情報技術産業協会
一般社団法人日本自動車工業会
一般社団法人日本自動車部品工業会
一般社団法人日本損害保険協会
一般社団法人JASPAR
公益社団法人自動車技術会
国立研究開発法人産業技術総合研究所
特定非営利活動法人ITS Japan
独立行政法人情報処理推進機構
日本自動車輸入組合
(※)は将来課題検討WGメンバー
経済産業省製造産業局
国土交通省自動車局
A.T.カーニー株式会社
事務局
内閣府SIP
内閣官房IT総合戦略室
警察庁交通局
国土交通省道路局
有本
建男
政策研究大学院大学
客員教授/科学技術振興機構 上席フェロー
岩田
悟志
株式会社デンソーテン
代表取締役会長
大平
隆
いすゞ自動車株式会社
常務執行役員
小川
紘一
東京大学
政策ビジョン研究センター シニアリサーチャー
小川
立夫
パナソニック株式会社
オートモーティブ社 副社長
小川
博
日野自動車株式会社
技監
加藤
洋一
株式会社
SUBARU 取締役専務執行役員
加藤
良文
株式会社デンソー
経営役員
鎌田
実
東京大学大学院
新領域創成科学研究科 教授
河合
英直
独立行政法人
自動車技術総合機構
交通安全環境研究所
自動車研究部長
工藤
秀俊
マツダ株式会社
執行役員 R&D管理・商品戦略担当
鯉渕
健
トヨタ自動車株式会社
先進安全領域 統括部長
清水
和夫
国際
自動車ジャーナリスト
周
磊
デロイト
トーマツ コンサルティング合同会社 執行役員 パートナー
須田
義大
東京大学
教授(生産技術研究所 次世代モビリティ研究センター)
モビリティ
・イノベーション連携研究機構長
高田
広章
名古屋大学
未来社会創造機構 教授
永井
正夫
一般財団法人日本自動車研究所
代表理事 研究所長
中畔
邦雄
日産自動車株式会社
執行役副社長
中野
史郎
株式会社ジェイテクト
シニアフェロー
三部
敏宏
本田技研工業株式会社
常務執行役員/株主会社本田技術研究所 代表取締役社長
山足
公也
日立オートモーティブシステムズ株式会社
エグゼクティブオフィサー
CTO
兼技術開発本部長
山本
信吾
ルネサスエレクトロニクス株式会社
執行役員常務兼オートモーティブソリューション
事業
本部長

1.はじめに
これまでの検討結果を踏まえ、「自動走行の実現に向けた取組報告と方針」Version4.0として整理。
1.はじめに
2.無人自動運転サービスの実現及び普及に向けたロードマップ
3.自動運転の高度化に向けた実証実験
4.協調領域等の取組
5.おわりに
【項目】
※なお、工程表等の取組方針は、車両側の技術及び自動車メーカー、サプライヤー等との議論を通して記載したも
のであり、制度・インフラ側からの検討は別途必要。
4













