### ARM启动代码详解
#### 一、ARM启动代码与Bootloader的概念区分
##### 1.1 定义
- **启动代码**:指的是处理器在复位后执行的第一条指令到进入C语言`main()`函数之前的那部分汇编代码。这部分代码负责完成基本硬件配置、内存初始化等工作。
- **Bootloader**:是一个具有引导装载功能的完整程序项目,例如能够引导Linux或Windows CE等操作系统的vivi、u-boot等。它不仅包含启动代码,还可能包括网络、存储设备驱动等功能。
##### 1.2 功能对比
- **启动代码**关注于处理器的基本配置,如设置寄存器、开启时钟等,确保处理器处于安全稳定的状态。
- **Bootloader**除了包含启动代码的功能外,还负责更高级的操作,比如加载操作系统内核到内存并跳转执行,支持用户交互(如命令行界面),以及通过网络下载文件等。
#### 二、分析理解启动代码的重要性
对于初学者而言,理解和分析ARM启动代码是一项挑战性的任务,但对于深入掌握ARM处理器的工作原理至关重要:
- **调试依据**:在开发过程中,启动代码是判断处理器是否正确运行的重要依据。无论是通过仿真器还是添加LED测试灯等手段,都是为了确认CPU执行到了哪个步骤。
- **基础构建**:启动代码是整个软件栈的基础,它为后续的操作系统或其他软件提供了必要的运行环境。因此,了解启动代码有助于更好地进行嵌入式系统的设计与调试。
#### 三、ARM体系结构与汇编基础知识
在分析启动代码之前,了解以下ARM体系结构与汇编基础知识非常必要:
##### 3.1 数据类型支持
- **字节(8位)**:用于表示字符等小数据量的信息。
- **半字(16位)**:适合处理较大数据量的情况。
- **字(32位)**:通常用于表示整型变量、地址等。
##### 3.2 处理器状态
- **ARM状态(32位)**:执行32位指令集。
- **Thumb状态(16位)**:执行压缩指令集,主要用于减少代码大小。
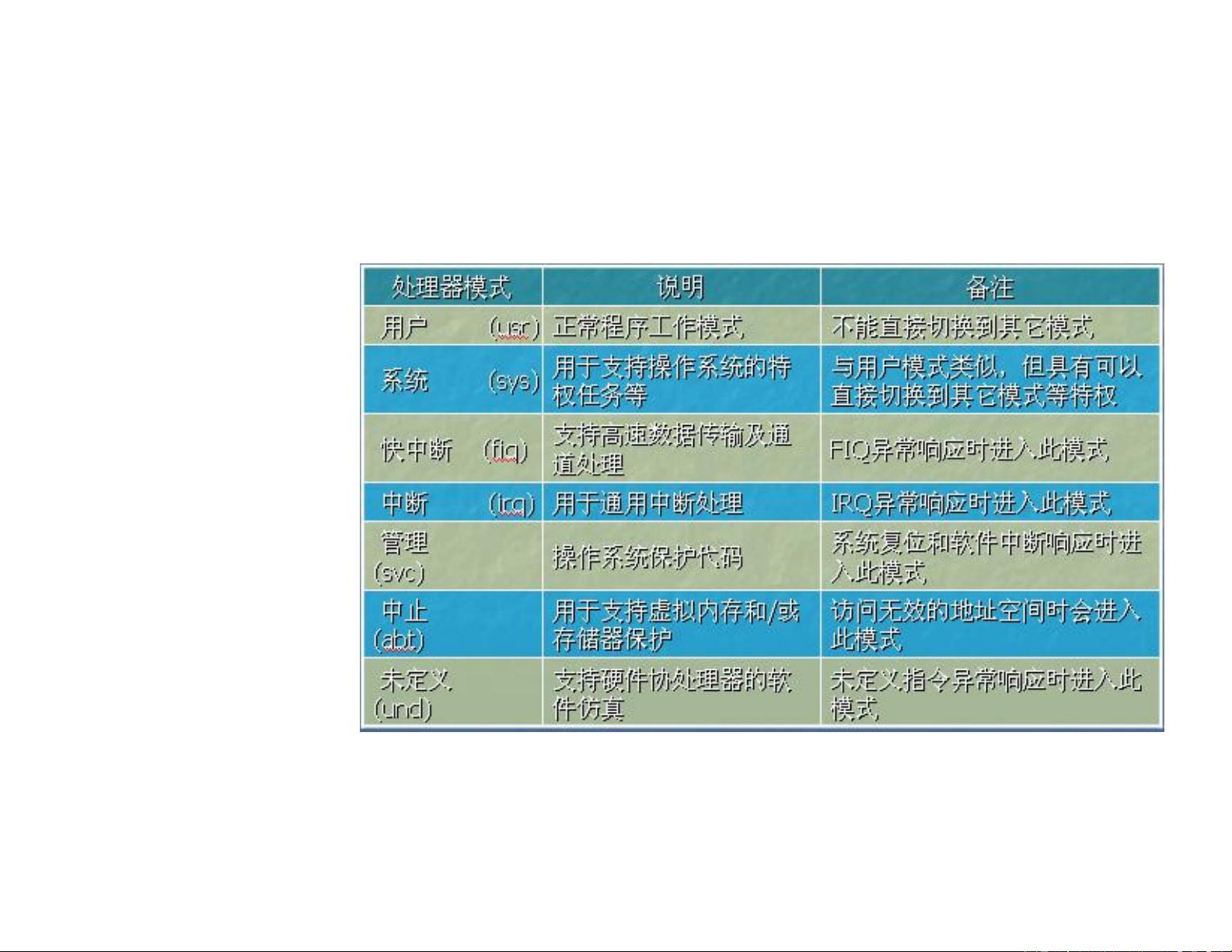
##### 3.3 处理器模式
- **用户模式(User)**:正常程序运行模式。
- **快速中断模式(FIQ)**:用于高速中断处理。
- **中断模式(IRQ)**:处理普通中断。
- **管理模式(SVC)**:系统调用。
- **中止模式(ABORT)**:内存访问错误。
- **未定义模式(UNDEF)**:未知指令错误。
- **系统模式(SYS)**:与用户模式相似,但具有更多权限。
##### 3.4 内部寄存器
- **通用寄存器**:共31个32位寄存器,编号R0-R30,其中R13通常作为堆栈指针(SP),R14为连接寄存器(LR),R15为程序计数器(PC)。
- **状态寄存器**:包括程序状态寄存器(PSR)、应用程序状态寄存器(APSR)等。
#### 四、启动代码功能模块分析
##### 4.1 程序入口
- **定义程序入口**:启动代码通常使用`ENTRY`伪操作定义程序的入口点,告知链接器保留该段代码不被优化掉。在CodeWarrior for ARM Developer Suite环境中,需要通过`Edit -> Debug Setting -> ARM Linker -> Option -> Image entry point`来指定映像的入口地址。
- **链接器设置**:此外,在`Edit -> Debug Setting -> ARM Linker -> Layout -> Place at beginning of image`中指定目标文件和输入段名称,以确保程序有一个明确的入口点。
##### 4.2 示例代码解析
```assembly
AREA Init, CODE, READONLY
ENTRY
ASSERT :DEF:ENDIAN_CHANGE
[ENDIAN_CHANGE
ASSERT:DEF:ENTRY_BUS_WIDTH
[ENTRY_BUS_WIDTH=32
b ChangeBigEndian ;DCD 0xea000007
]
[ENTRY_BUS_WIDTH=16
andeq r14,r7,r0,lsl#20 ;DCD 0x0007ea00
]
[ENTRY_BUS_WIDTH=8
streq r0,[r0,-r10,ror#1] ;DCD 0x070000ea
]
|
b ResetHandler
]
```
- **程序入口定义**:首先定义了一个名为`Init`的代码段,并通过`ENTRY`指示程序的入口。
- **端序检测**:使用`ASSERT`伪操作判断是否定义了`ENDIAN_CHANGE`,如果未定义,则会报错并停止汇编。接下来检查`ENTRY_BUS_WIDTH`的值,根据不同的值执行相应的指令。
- 如果`ENTRY_BUS_WIDTH`等于32,则跳转到`ChangeBigEndian`。
- 如果`ENTRY_BUS_WIDTH`等于16,则执行`andeq`指令。
- 如果`ENTRY_BUS_WIDTH`等于8,则执行`streq`指令。
- **异常处理**:最后跳转到`ResetHandler`进行复位异常处理。
#### 总结
ARM启动代码是嵌入式系统开发的核心组成部分之一,其主要作用是初始化处理器硬件环境,为后续的系统软件提供一个稳定的运行平台。通过对启动代码的理解与分析,可以帮助开发者更深入地掌握ARM处理器的工作机制,提高系统的可靠性和性能。此外,启动代码与Bootloader之间的关系也是嵌入式系统开发中一个重要的概念区分,明确二者之间的区别有助于更好地组织和设计嵌入式系统软件架构。






 bhtlbhtl1232015-07-28不错,可以参考学习
bhtlbhtl1232015-07-28不错,可以参考学习











