

This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
IEEE TRANSACTIONS ON CYBERNETICS 1
Enhanced Computer Vision with
Microsoft Kinect Sensor: A Review
Jungong Han, Member, IEEE, Ling Shao, Senior Member, IEEE, Dong Xu, Member, IEEE, and
Jamie Shotton,
Member, IEEE
Abstract—With the invention of the low-cost Microsoft Kinect
sensor, high-resolution depth and visual (RGB) sensing has
become available for widespread use. The complementary nature
of the depth and visual information provided by the Kinect sensor
opens up new opportunities to solve fundamental problems in
computer vision. This paper presents a comprehensive review of
recent Kinect-based computer vision algorithms and applications.
The reviewed approaches are classified according to the type of
vision problems that can be addressed or enhanced by means
of the Kinect sensor. The covered topics include preprocessing,
object tracking and recognition, human activity analysis, hand
gesture analysis, and indoor 3-D mapping. For each category of
methods, we outline their main algorithmic contributions and
summarize their advantages/differences compared to their RGB
counterparts. Finally, we give an overview of the challenges in
this field and future research trends. This paper is expected to
serve as a tutorial and source of references for Kinect-based
computer vision researchers.
Index Terms—Computer vision, depth image, information
fusion, Kinect sensor.
I. Introduction
K
INECT is an RGB-D sensor providing synchronized
color and depth images. It was initially used as an
input device by Microsoft for the Xbox game console [1].
With a 3-D human motion capturing algorithm, it enables
interactions between users and a game without the need
to touch a controller. Recently, the computer vision society
discovered that the depth sensing technology of Kinect could
be extended far beyond gaming and at a much lower cost than
traditional 3-D cameras (such as stereo cameras [2] and time-
of-flight (TOF) cameras [3]). Additionally, the complementary
nature of the depth and visual (RGB) information provided
Manuscript received November 12, 2012; revised April 4, 2013; accepted
May 13, 2013. This work was supported by the Multiplatform Game In-
novation Centre (MAGIC), Nanyang Technological University, Singapore.
Recommended by Associate Editor D. Goldgof. (Corresponding author: L.
Shao)
J. Han is with Civolution Technology, Eindhoven 5656AE, The Netherlands
(e-mail: jungonghan77@gmail.com).
L. Shao is with the Department of Electronic and Electrical Engineering,
University of Sheffield, Sheffield, South Yorkshire, S1 3JD, U.K. (e-mail:
ling.shao@sheffield.ac.uk).
D. Xu is with the School of Computer Engineering, Nanyang Technological
University, 639798, Singapore (e-mail: DongXu@ntu.edu.sg).
J. Shotton is with Microsoft Research, Cambridge CB1 2FB, U.K. (e-mail:
jamiesho@microsoft.com).
Color versions of one or more of the figures in this paper are available
online at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TCYB.2013.2265378
by Kinect bootstraps potential new solutions for classical
problems in computer vision. In just two years after Kinect
was released, a large number of scientific papers as well
as technical demonstrations have already appeared in diverse
vision conferences/journals.
In this paper, we review the recent developments of Kinect
technologies from the perspective of computer vision. The
criteria for topic selection are that the new algorithms are
far beyond the algorithmic modules provided by Kinect de-
velopment tools, and meanwhile, these topics are relatively
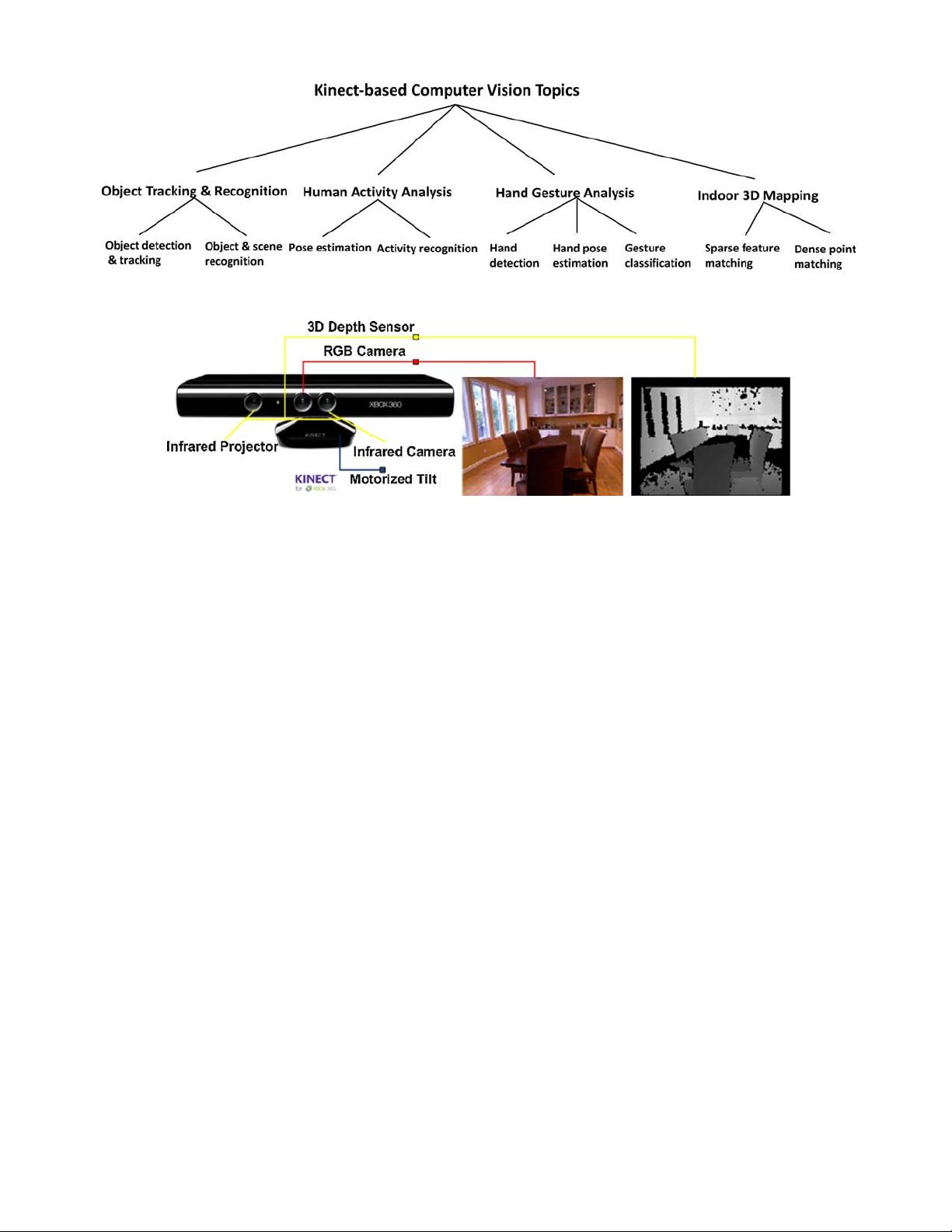
more popular with a substantial number of publications. Fig. 1
illustrates a tree-structured taxonomy that our review follows,
indicating the type of vision problems that can be addressed
or enhanced by means of the Kinect sensor. More specifically,
the reviewed topics include object tracking and recognition,
human activity analysis, hand gesture recognition, and indoor
3-D mapping. The broad diversity of topics clearly shows the
potential impact of Kinect in the computer vision field. We do
not contemplate details of particular algorithms or results of
comparative experiments but summarize main paths that most
approaches follow and point out their contributions.
Until now, we have only found one other survey-like paper
to introduce Kinect-related research [4]. The objective of that
paper is to unravel the intelligent technologies encoded in
Kinect, such as sensor calibration, human skeletal tracking
and facial-expression tracking. It also demonstrates a prototype
system that employs multiple Kinects in an immersive tele-
conferencing application. The major difference between our
paper and [4] is that [4] tries to answer what is inside Kinect,
while our paper intends to give insights on how researchers
exploit and improve computer vision algorithms using
Kinect.
The rest of the paper is organized as follows. First, we
discuss the mechanism of the Kinect sensor taking both
hardware and software into account in Section II. The purpose
is to answer what signals the Kinect can output, and what ad-
vantages the Kinect offers compared to conventional cameras
in the context of several classical vision problems. In Section
III, we introduce two preprocessing steps: Kinect recalibration
and depth data filtering. From Section IV to Section VII, we
give technical overviews for object tracking and recognition,
human activity analysis, hand gesture recognition and indoor
3-D mapping, respectively. Section VIII summarizes the cor-
responding challenges of each topic, and reports the major
trends in this exciting domain.
2168-2267/$31.00
c
2013 IEEE
剩余16页未读,继续阅读
资源评论













