Railway Track Irregularity Measuring by GNSS INS Integration.pdf
需积分: 3 195 浏览量
2020-04-07
10:13:56
上传
评论
收藏 1.29MB PDF 举报


Railway Track Irregularity Measuring by GNSS/
INS Integration
QIJIN CHEN, XIAOJI NIU, QUAN ZHANG, and YAHAO CHENG
GNSS Research Center, Wuhan University
Received November 2013; Revised August 2014
ABSTRACT: Railway track irregularity measuring is a task of fundamental importance to guarantee operating
safety and arrange proper maintenance, particularly for the high-speed lines. Conventional measuring methods
cannot satisfy the requirements of accuracy and time-efficiency simultaneously. A GNSS/INS integrated technique
is proposed based on the fact that railway track irregularity detection is essentially an issue of relative surveying. Key
technologies of the integration algorithm aiming at track irregularity measuring are proposed to improve the
performance of the GNSS/INS system. Results show that the proposed method can fulfill 1 mm relative accuracy
in identifying track irregularities in the kinematic surveying mode, which means this method can satisfy the
accuracy requirement for a high-speed line and is ten times faster than the conventional method based on total
station. Copyright # 2015 Institute of Navigation
INTRODUCTION
The railway track condition tends to deteriorate
due to some external factors, such as frequent
passage of heavy trains and deformation of the track
bed. These factors make the railway track drift away
from its designed geometry thus result in track
irregularity [1]. Track irregularity, i.e., track
deformation, is one of the most important factors
that cause safety problems and further track
deterioration [2]. So detecting and fixing the track
irregularity is a task of fundamental importance to
guarantee high operating safety, especially for the
high-speed lines.
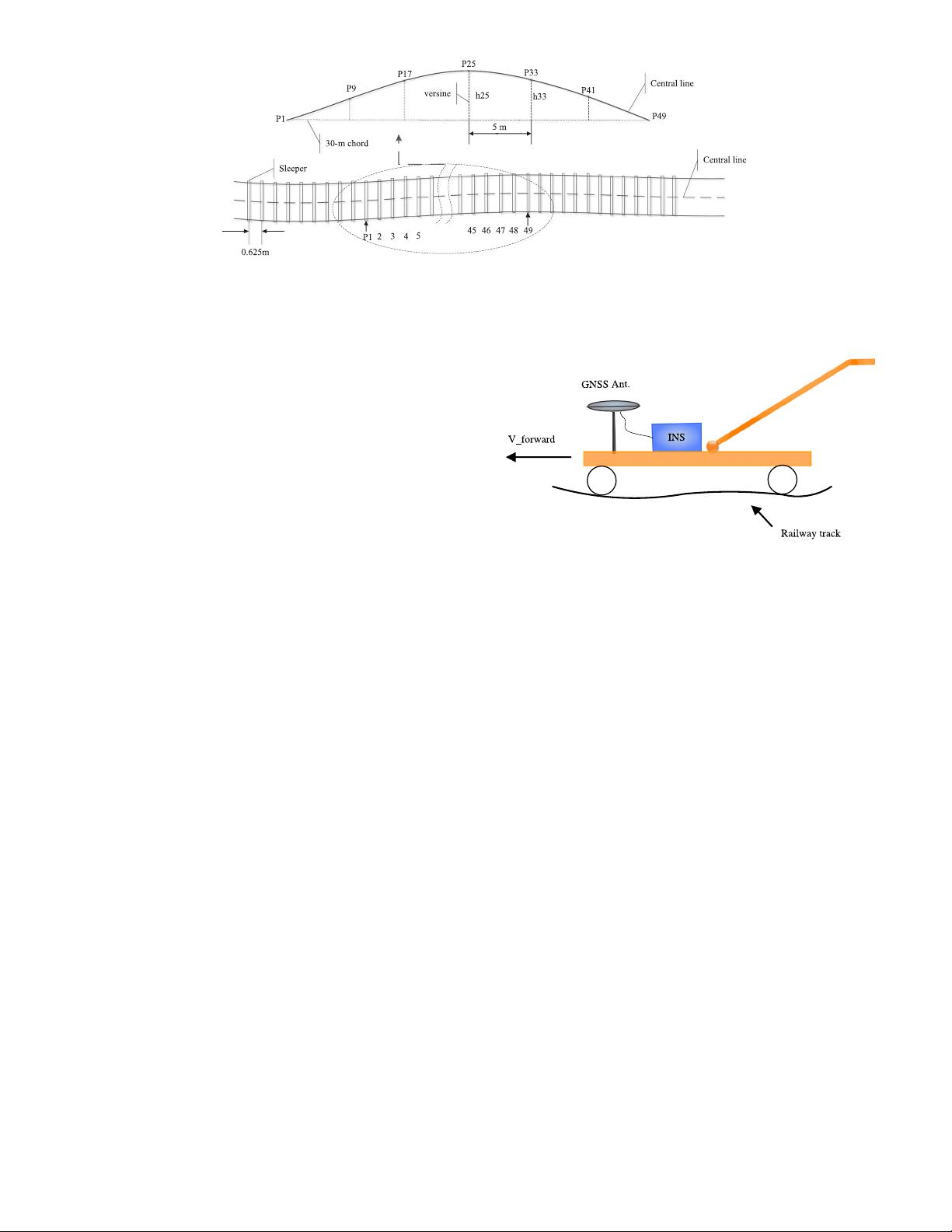
The requirement of track smoothness for the high-
speed line is quite demanding, since even track
deformations with small magnitude (e.g., 2 mm/5 m
for 30-m chord [3]) would lead to considerable
dynamic vehicle response forces under high speed
operation. To detect such small deformations, the
track position should be determined with sub-
millimeter accuracy. In addition, time slots (i.e.,
skylight time) permitted for railway surveying for
the existing line are limited due to high traffic
volumes. Thus flexible surveying systems are
required yielding accurate data within a short time.
Nowadays, railway track irregularities are
primarily measured dynamically by the special track
inspection locomotive, which can be operated at high
speed but does not satisfy the accuracy requirement
for track correction. Lightweight track trolleys
combined with high-precision total station are widely
deployed as a supplement of the dynamic inspection.
The well-known products of the high-precision track
surveying trolley are Amberg GRP1000 by Amberg
Technologies and Trimble GEDO CE. They have
been widely deployed in China for railway cons-
truction and are officially recommended to survey
the unloaded track geometry for track correction
following the dynamic inspection. These types of
track trolleys equipped with motorized total station
claim to measure the absolute deviation of the
railway track from its designed geometry with the
accuracy of 1 millimeter in the stop-and-go mode.
This method has two shortcomings: a) not fast
enough, e.g., we can only survey 150-m of track per
hour using this method; b) surveying accuracy is
determinedly affected by the condition of the railway
construction control network, which is not well
maintained in China for the existing line due to the
huge maintenance cost.
It can be summarized that the conventional
methods cann ot satisfy the requirements of accuracy
and time-efficiency simultaneously. So we propose
to use a GNSS/INS technique to meet these two
requirements.
In previous work, the inertial technique has
been widely utilized for railway track surveying and
track condition monitoring. Inertial sensors, e.g.,
NAVIGATION: Journal of The Institute of Navigation
Vol. 62, No. 1, Spring 2015
Printed in the U.S.A.
83

剩余10页未读,继续阅读
资源评论













