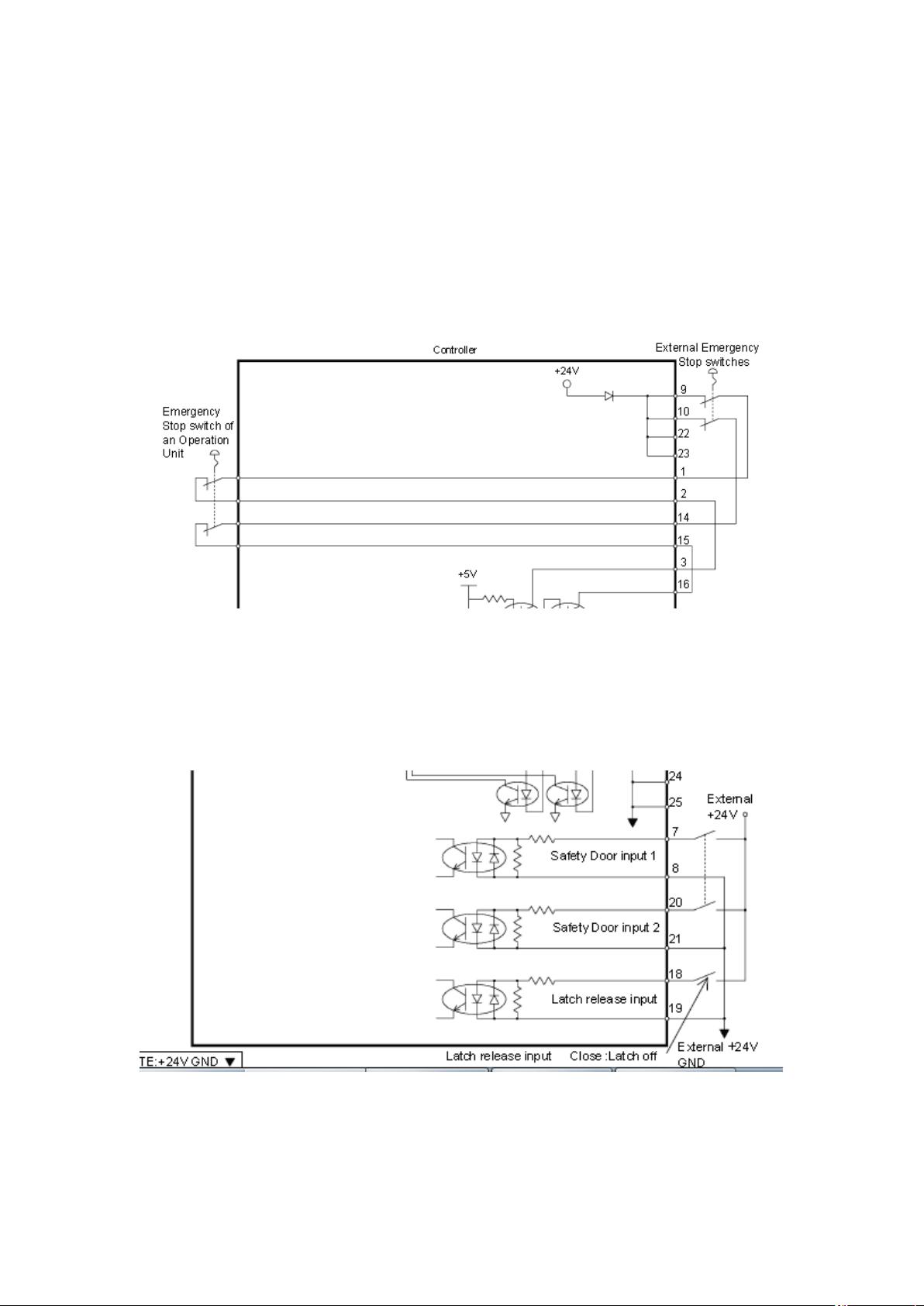
随着自动化技术的飞速发展,机器人在工业生产中的应用日益广泛。爱普生作为领先的机器人制造厂商之一,其产品在提升生产效率的同时,也对用户的安全提出了更高的要求。为此,爱普生提供了一系列的安全防护指导,确保用户在操作其设备时能够保障安全,防止设备损坏,同时确保机器人高效稳定地运行。 爱普生的安全防护指导强调了硬件防护的重要性。其中,紧急停止开关是基础安全措施之一。它通过在安全输入输出(I/O)中连接特定的信号线路(如9路和10路),确保在任何紧急情况下,操作者可以迅速触发外部急停开关,实现机器的快速伺服关闭和刹车启动,从而实现对运行中的设备进行即时的安全干预。这样一来,即使在最为危险的时刻,也能够最大限度地减少设备或人员可能遭受的伤害。 另外,安全门的设置也是硬件防护中的一项重要措施。在机器人操作区域的入口处安装安全门,并将安全门的信号接入控制系统(如7路和20路)。当安全门被打开时,机器人将立即停止所有操作,以防止任何未经授权的人员进入操作区域。只有当安全门重新关闭并输入了正确的复位信号之后,机器人方可重新启动。这不但保护了机器人的安全,更是对操作人员的生命安全提供了保障。 而从软件防护的角度来看,爱普生的指导同样周到。例如,通过XYLIM指令设定XY轴的工作极限,能够防止机器人超出其正常工作范围,避免因超出限制而导致的机械损坏或人身事故。值得一提的是,当将XYLIM指令设置为0时,极限保护将不会被启用,这样在某些特殊应用中给使用者提供了灵活性。 另外,TCLIM指令允许用户为特定轴设定最大扭力值,这有助于预防机器人的过载。在进行精细操作或是需要避免碰撞的场合,此指令显得尤为关键。同样,安全位置指令确保在机器人执行移动指令之前,Z轴已提升至安全高度,即使在异常情况下也能有效避免与障碍物发生碰撞。 路径规划避障功能的引入,是对机器人智能判断能力的进一步提升。通过CX、CY、CZ、CU指令获取当前坐标,并根据障碍物的位置预先设定路径中的中间点,爱普生的机器人能够在移动中智能判断并绕过障碍物。这不仅提升了机器人的运行效率,也为操作者的安全提供了更进一步的保障。 在机器人出现异常时,错误处理指令ERR的运用就显得尤为重要。该指令可以获取报警代码,帮助使用者快速诊断和解决机器人在运行过程中遇到的问题。这种高效的故障排查机制,大大提升了生产效率,同时降低了因故障停机而造成的损失。 爱普生的安全防护指导体现了对用户安全和设备稳定运行的全面考虑。硬件和软件防护措施的综合应用,构建了多层次的安全保护网络,最大程度地减少了潜在风险。对于操作者而言,全面理解和正确应用这些安全指导措施,不仅是确保机器人设备高效稳定运行的基础,也是维护工作场所安全的基本要求。随着技术的不断进步,爱普生公司也将继续更新和完善其安全防护体系,以确保其产品能在一个安全、高效和智能的环境中不断进步。
本内容试读结束,登录后可阅读更多
下载后可阅读完整内容,剩余3页未读,立即下载







评论0
最新资源