2011年全国电子设计大赛小车设计论文.doc
版权申诉
180 浏览量
2024-03-14
16:40:00
上传
评论
收藏 541KB DOC 举报


- 1 -
2011 年全国大学生电子设计竞赛
设计报告
智能小车(本科 C 题)
广西赛区【94 组】
摘 要
本系统是以AT89S52单片机为控制核心的智能小车的设计,采用L298构成电
机驱动电路,,利用红外对管检测黑线,同时还用超声波传感器实现两车距离的
测量,完成超车功能,其中速度由单片机输出的PWM波控制。AT80S52单片机是一
款八位单片机,它的易用性和多功能性受到了广大使用者的好评。由于超声波指
向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的
测量,如测距仪和物位测量仪等都可以通过超声波来实现。利用超声波检测往往
比较迅速、方便、计算简单、易于做到实时控制,并且在测量度方面能达到工业
实用的要求,因此在移动机器人的研制上也得到了广泛的应用。
一、 系统设计
1.1设计要求
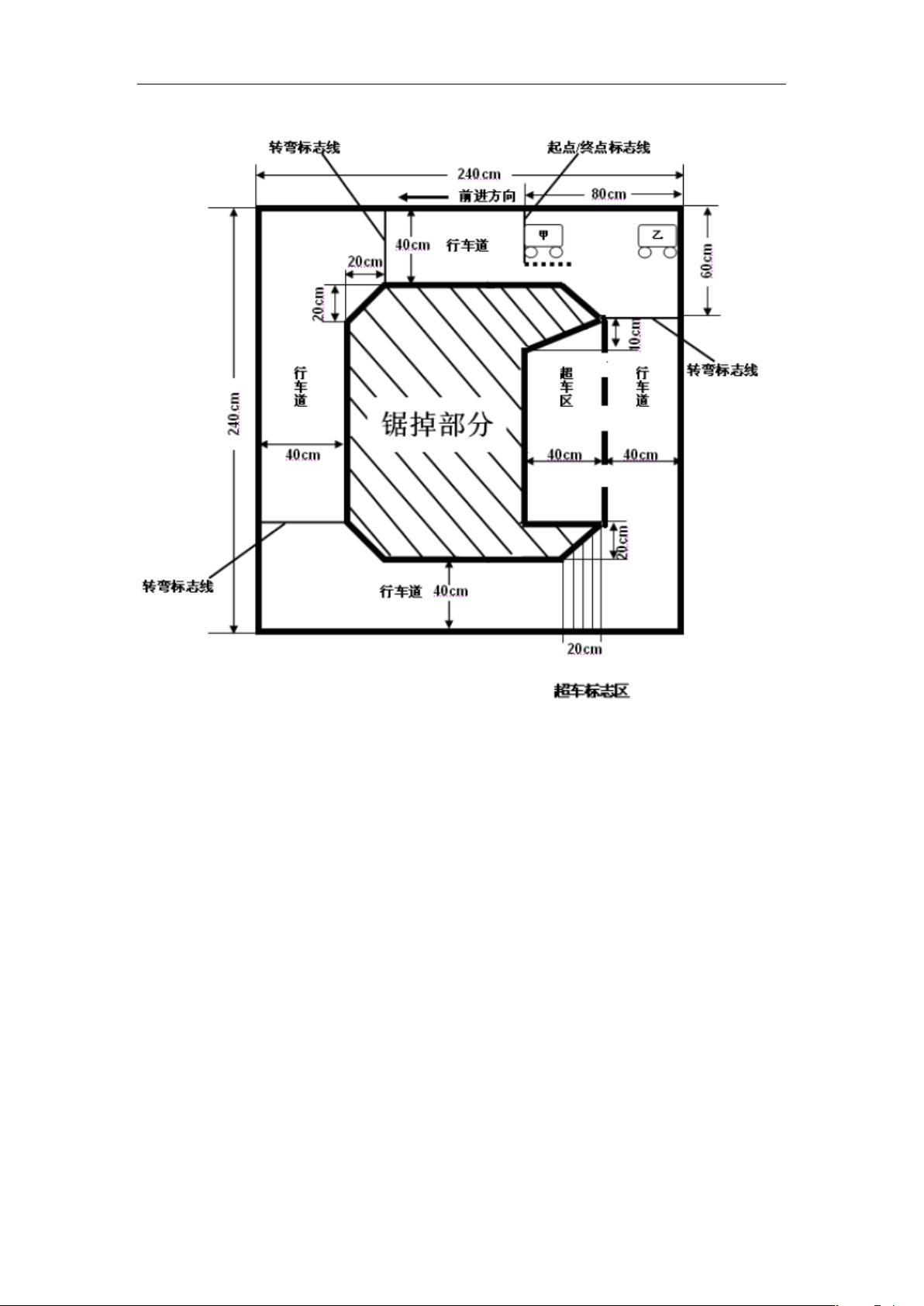
甲车车头紧靠起点标志线,乙车车尾紧靠边界,甲、乙两辆小车同时起动,先
后通过起点标志线,在行车道同向而行,实现两车交替超车领跑功能。跑道如图
1所示。

剩余23页未读,继续阅读
资源评论













