大学毕业论文---机械手自动操作系统设计.doc
159 浏览量
2023-06-29
12:19:01
上传
评论
收藏 1.78MB DOC 举报


1 绪论
1.1 课题提出背景
如今,机械自动化已经成为了新时代的主题。其中,机械手是工业生产过程中应
用最多的,而且它的发展也是最快的。工业生产自动化的程度越来越高,而生产环境
变得越来越恶劣,这样对工人提出了更高的要求,比如安全性、健康性、环保性等。
机械手可以有效的解决这个问题,它可以在高温、高压、有毒、放射性等场合应用。
在机械制造行业中,机械手又称工业机器人,它主要被应用于运送加工原料或者给特
定的机床进行刀具的转换和机器的装配等一些自动化流水生产线上。综上所述,机械
手的应用更加有效率,同时还能降低生产成本。
机械手是一门综合性的学科,它包含了机械、电子、材料、自动控制等许多学科
方面的知识。随着计算机和电子技术的飞速发展,机械手也不断的更新换代,朝着精
密化、智能化、复杂化的方向发展。如今的机械手加入了传感器反馈系统,当机械手
发生故障时,它可以自我检测,并且自动修复。
工业的自动化程度的高低离不开 PLC, 它的控制能力越高,自动化的程度也越高。
所以 PLC 常被用于工业生产中,随着它的地位逐渐增长,它的功能也随之有了很大的
提高。对于 PLC 而言,它的程序编写容易、系统操作灵活,同时对于控制也方便实现,
这样能够提高工业生产的效率和加工的质量。在一些恶劣的环境下,PLC 同样能够取
代人类去完成一些控制,从另一方面而言,成本也相对减轻了许多。基于 PLC 设计的
机械手自动操作系统,更加容易实现生产的连续性。
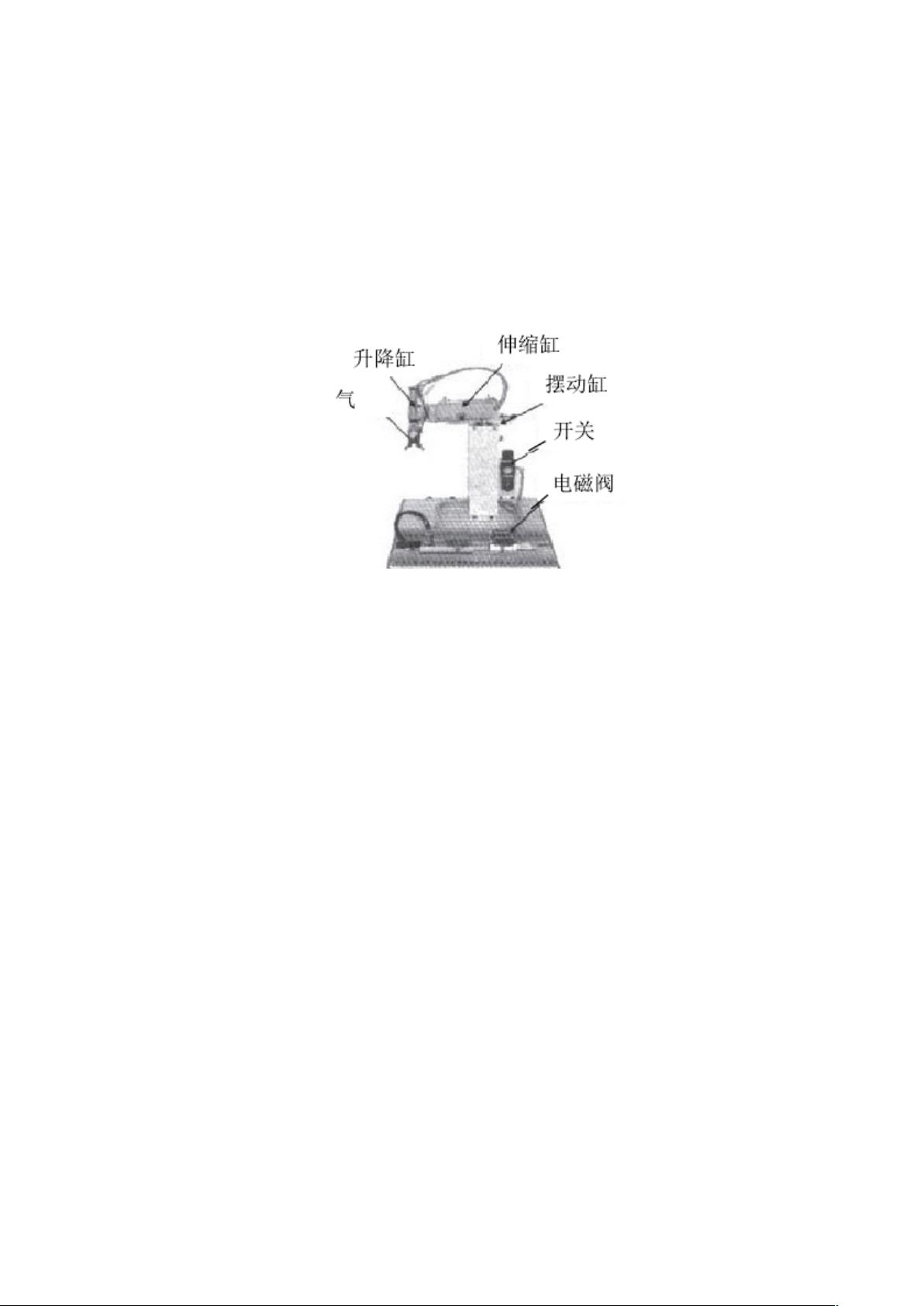
在本次设计任务中,选用三菱系列的 PLC 对机械手进行控制,完成自动操作系统
的设计。实现对机械手的上下、左右、旋转等控制,要完全实现这些,还需要其它辅
助元器件,比如气缸、传感器、电磁阀、底座和支架等。为了能够更加直观的对机械
手的动作进行展示,在本次设计中加入了组态软件对机械手进行监控。MCGS 是一种用
于对机械手整体监控的一种组态软件,通过对机械手运动数据的采集,MCGS 以动画形
式表现,对机械手的运动过程进行监控和整个流程的控制。
1.2 国内外研究现状
在 1954 年,美国的著名工程师沃尔德最早提出了人机一体化的构想;到了 1959
年,拥有丰富创造力的两人沃尔德和英格伯一同制造出了世界上第一台机械手;1962
年时,美国政府将机械手的实用性做了相关的叙述,机械手慢慢被大家所认知;1970



剩余35页未读,继续阅读
资源评论













