激光感知-地面分割-patchwork论文

需积分: 0 91 浏览量
更新于2023-12-08
1
收藏 5.52MB PDF 举报
《激光感知:基于同心圆区的区域化地面分割——Patchwork方法》
在现代移动平台,如无人地面车辆(UGVs)、无人机(UAVs)和自动驾驶汽车中,对周围环境的感知需求日益增长。为了实现这一目标,众多研究者已经采用各种三维感知方法。其中,三维激光雷达(LiDAR)传感器因其厘米级的精度、全方位的感知能力以及与立体相机相比更远的测量距离而被广泛使用。然而,地面分割是这些平台进行导航或邻近物体识别的关键,而现有的地面分割算法在处理不平整地面时面临挑战,例如陡峭的坡度、凹凸不平的道路以及路缘石、花坛等障碍物。
针对这些问题,本文提出了一种名为Patchwork的新颖地面分割方法,它对下分割问题有较强的鲁棒性,并且运行频率超过40Hz。Patchwork方法的核心在于将点云编码为基于同心圆区模型的表示,以在各个区间内分配适当密度的云点,同时保持较低的计算复杂度。随后进行区域化地面平面拟合,以估计每个区间的局部地面。引入地面概率估计,显著减少误检。通过在SemanticKITTI和粗糙地形数据集上的实验验证,提出的Patchwork方法相比于最先进的方法展现出颇具潜力的性能,而且在速度上优于现有的平面拟合方法。
具体来说,文章首先介绍了一种将点云编码到同心圆区模型的方法。这种方法将空间划分为多个同心圆环,每个环代表一个特定的距离范围。通过这种方式,可以更好地捕捉地面的不规则形状,同时降低了计算资源的需求。接着,区域化地面平面拟合阶段,每个圆环内的点被用来独立估计局部地面平面,这样能够处理复杂的地形情况,如坡地和小凸起。这种方法比全局平面拟合更能精确地捕捉地面的变化。
然后,地面概率估计是解决误检问题的关键。通过对每个点的地面概率进行估计,可以更准确地区分地面点和其他非地面点,从而减少错误分类。这一步骤结合了之前步骤的成果,提高了分割结果的准确性。
实验部分,文章对比了Patchwork方法在SemanticKITTI和粗糙地形数据集上的表现,证明了其在处理复杂环境下的优越性能。此外,代码的开源性(可在https://github.com/LimHyungTae/patchwork获取)使得其他研究者和开发者能够进一步测试和改进这个方法。
Patchwork方法通过创新的点云处理策略和地面分割技术,提升了移动平台在不平整地面上的导航和物体识别能力。这种方法不仅在性能上有所突破,而且在实时性方面也具有优势,为未来智能系统的地面感知提供了一条新的研究路径。
1
Patchwork: Concentric Zone-based Region-wise
Ground Segmentation with Ground Likelihood
Estimation Using a 3D LiDAR Sensor
Hyungtae Lim
1
, Student Member, IEEE, Minho Oh
1
, Hyun Myung
1
, Senior Member, IEEE
Abstract—Ground segmentation is crucial for terrestrial mo-
bile platforms to perform navigation or neighboring object
recognition. Unfortunately, the ground is not flat, as it features
steep slopes; bumpy roads; or objects, such as curbs, flower beds,
and so forth. To tackle the problem, this paper presents a novel
ground segmentation method called Patchwork, which is robust
for addressing the under-segmentation problem and operates
at more than 40 Hz. In this paper, a point cloud is encoded
into a Concentric Zone Model–based representation to assign an
appropriate density of cloud points among bins in a way that
is not computationally complex. This is followed by Region-wise
Ground Plane Fitting, which is performed to estimate the partial
ground for each bin. Finally, Ground Likelihood Estimation is
introduced to dramatically reduce false positives. As experimen-
tally verified on SemanticKITTI and rough terrain datasets,
our proposed method yields promising performance compared
with the state-of-the-art methods, showing faster speed compared
with existing plane fitting–based methods. Code is available:
https://github.com/LimHyungTae/patchwork
Index Terms—Range Sensing; Mapping; Field Robots; Ground
Segmentation
I. INTRODUCTION
I
N recent years, there has been an increased demand to
perceive surroundings for mobile platforms, such as Un-
manned Ground Vehicles (UGVs), Unmanned Aerial Vehicles
(UAVs), or autonomous cars. To accomplish this, numerous
researchers have applied various 3D perception methods [1]–
[4]. In particular, a 3D light detection and ranging (LiDAR)
sensor has been extensively deployed due to allowing for
centimeter-level accuracy and omnidirectional sensing, as well
as its ability to measure great distances compared with stereo
cameras [1], [5], [6]. Accordingly, a 3D point cloud captured
by a LiDAR sensor is utilized for semantic segmentation [7],
[8], tracking [9], detection [10], and so forth.
In this paper, we specifically focus on ground segmentation
tasks [11], [12]. There are two main purposes of ground
segmentation. One is to estimate the movable area [3], [13] for
This work was supported by the Industry Core Technology Development
Project, 20005062, Development of Artificial Intelligence Robot Autonomous
Navigation Technology for Agile Movement in Crowded Space, funded by
the Ministry of Trade, Industry & Energy (MOTIE, Republic of Korea) and
by the research project “Development of A.I. based recognition, judgement
and control solution for autonomous vehicle corresponding to atypical driving
environment,” which is financed from the Ministry of Science and ICT
(Republic of Korea) Contract No. 2019-0-00399. The students are supported
by the BK21 FOUR from the Ministry of Education (Republic of Korea).
1
Hyungtae Lim,
1
Minho Oh, and
1
Hyun Myung are with the School of
Electrical Engineering, KI-AI, KI-R at KAIST (Korea Advanced Institute
of Science and Technology), Daejeon, 34141, South Korea. {shapelim,
minho.oh, hmyung}@kaist.ac.kr
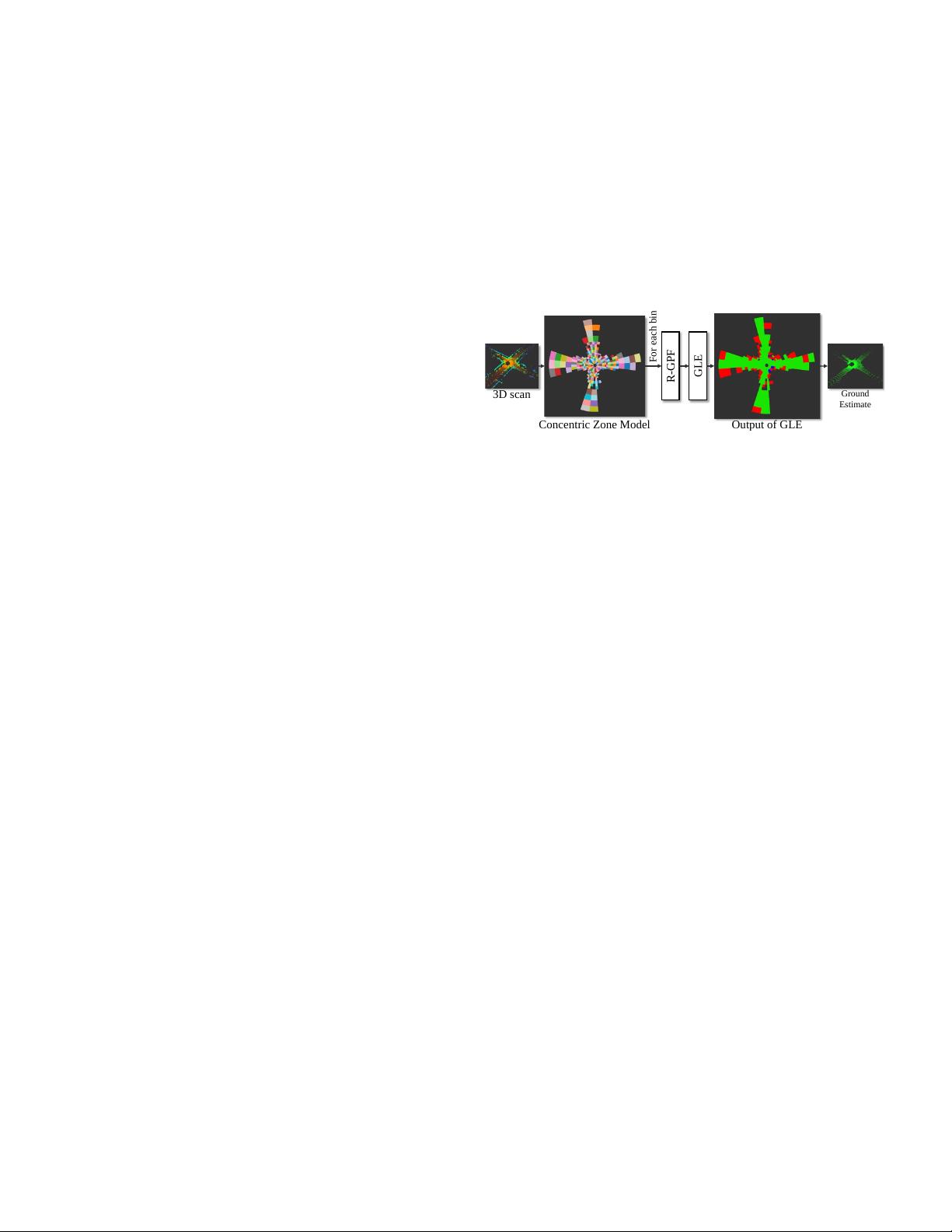
GLE
Concentric Zone Model Output of GLE
Ground
Estimate
3D scan
For each bin
R-GPF
Fig. 1. Overview of our proposed method called Patchwork.
Patchwork mainly consists of three parts: Concentric Zone
Model (CZM)–based polar grid representation, Region-wise
Ground Plane Fitting (R-GPF), and Ground Likelihood Esti-
mation (GLE).
successful navigation. The other purpose, on which this paper
places more emphasis, is the segmentation of a point cloud
to recognize or track moving objects. Terrestrial vehicles or
humans inevitably come into contact with the ground [14];
ideally, dynamic objects can be recognized in a simple way,
such as through Euclidean clustering if the ground is well
estimated [8], [15]. Furthermore, because most cloud points
belong to the ground, ground segmentation can significantly
reduce computational power when one is performing object
segmentation or detection in a preprocessing stage [16]. Thus,
ground in this study refers to not only the road, which is a
movable area, but also all regions that moving objects can
come into contact with, including sidewalks or lawns.
In this study, as presented in Fig. 1, we propose a novel
Concentric Zone Model (CZM)–based region-wise ground
segmentation method, called Patchwork, which is an extension
of Region-wise Ground Plane Fitting (R-GPF) in our previous
study [14]. The aim of R-GPF in our previous study was to
estimate the ground points for static map building purposes,
whereas here, we focus only on ground segmentation on a
3D point cloud. We also conduct detailed experiments on the
impact of the bin size, which was not covered in our previous
paper.
In summary, the contribution of this paper is threefold:
• To the best of our knowledge, it is the first attempt to
analyze the impact of bin size when estimating ground
planes in complex urban environments using the Se-
manticKITTI dataset [1]. Accordingly, an efficient, non-
uniform, region-wise representation of a 3D point cloud
is proposed, referred to as a CZM–based representation
whose bin size is different depending on each zone.
• Also, we leverage Ground Likelihood Estimation (GLE)
in terms of uprightness, elevation, and flatness to deter-
arXiv:2108.05560v2 [cs.RO] 10 Mar 2022

剩余7页未读,继续阅读
156 浏览量
201 浏览量
132 浏览量
201 浏览量
188 浏览量
108 浏览量
128 浏览量
2022-04-28 上传
2021-03-19 上传
2019-07-11 上传
134 浏览量
193 浏览量
157 浏览量
122 浏览量
149 浏览量
165 浏览量
190 浏览量
2021-04-03 上传
2022-09-24 上传
2021-02-03 上传
117 浏览量
102 浏览量
资源评论


良辰与日月
- 粉丝: 135
- 资源: 3









最新资源
- 微信小程序蚂蚁项目.zip
- 基于Vuforia和OpenGL设计的AR安卓应用,可以显示化学分子AR模型(毕业设计项目).zip
- 宠物寄养网站(源码+数据库+论文+ppt)java开发springboot框架javaweb,可做计算机毕业设计或课程设计
- 宠物领养系统(源码+数据库+论文+ppt)java开发springboot框架javaweb,可做计算机毕业设计或课程设计
- 基于EggJS + MySQL + Sequelize 技术的一套地摊引流商城后端服务。这是一套移动端地摊引流电子商城系统后端服务,轻量无支付,无需注册支付平台即可使用
- Qt-基于VLC设计的流媒体播放器.zip
- 基于SSM开发框架的线上单元考试系统,分为学生,教师,管理员三个用户,包括考试中心,试卷回顾,试题管理,学生管理,教师管理和试卷管理等等.zip
- Comsol等离子体仿真揭秘空气棒板电晕放电及空气反应中的潜在世界探索之旅!,Comsol等离子体仿真:空气棒板电晕放电及23种精简空气反应研究,Comsol等离子体仿真,空气棒板电晕放电,23种精简
- 大学生心理健康管理系统(源码+数据库+论文+ppt)java开发springboot框架javaweb,可做计算机毕业设计或课程设计
- 大学生社团管理系统(源码+数据库+论文+ppt)java开发springboot框架javaweb,可做计算机毕业设计或课程设计
- 大学生心理健康评测系统(源码+数据库+论文+ppt)java开发springboot框架javaweb,可做计算机毕业设计或课程设计
- 基于Java开发的综合性心理咨询平台后端设计源码
- 软件工程导论期末作业展示用网页.zip
- 安卓项目-天气的android端.zip
- 电影评论网站(源码+数据库+论文)java开发springboot框架javaweb,可做计算机毕业设计或课程设计
- Comsol等离子体仿真:探究Ar棒板粗通道流注放电的三维电场强度与电子温度研究(版本信息附注),Comsol 5.5与6.0版本中的等离子体仿真:探究电子密度、电子温度、三维视图与电场强度在Ar棒板
