klomp2014.pdf
需积分: 0 93 浏览量
2023-12-18
22:11:46
上传
评论
收藏 1.25MB PDF 举报


Vehicle System Dynamics, 2014
Vol. 52, Supplement, 172–188, http://dx.doi.org/10.1080/00423114.2014.887737
Longitudinal velocity and road slope estimation in hybrid
electric vehicles employing early detection of
excessive wheel slip
Matthijs Klomp
a∗
, Yunlong Gao
b
and Fredrik Bruzelius
c
a
Vehicle Dynamics & Controls, e-AAM Driveline Systems, Trollhättan, Sweden;
b
Clean Energy
Automotive Engineering Center, Tongji University, Shanghai, People’s Republic of China;
c
Department of Applied Mechanics, Chalmers University of Technology, Gothenburg, Sweden
(Received 1 November 2013; accepted 21 January 2014)
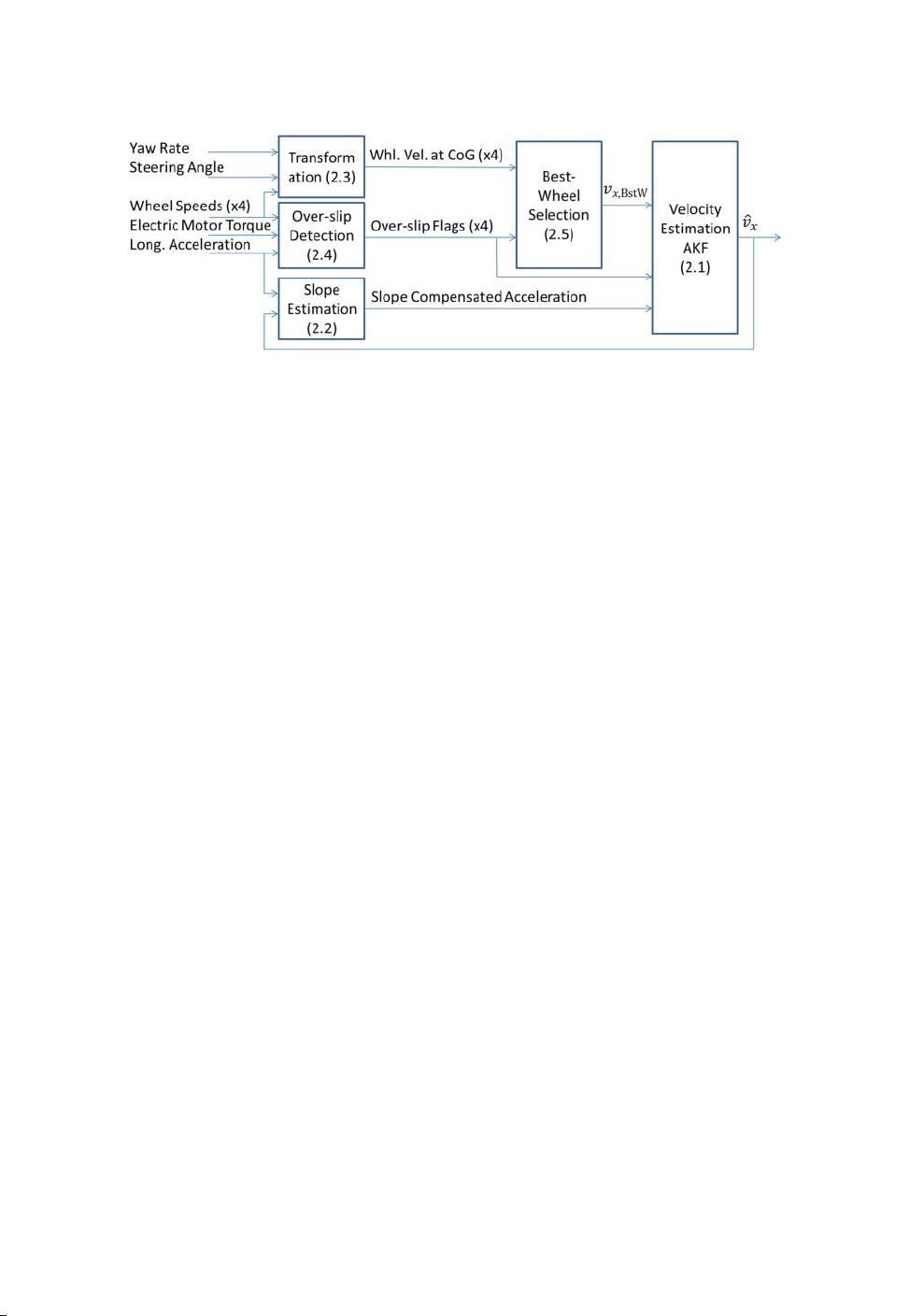
Vehicle speed is one of the important quantities in vehicle dynamics control. Estimation of the slope
angle is in turn a necessity for correct dead reckoning from vehicle acceleration. In the present work,
estimation of vehicle speed is applied to a hybrid vehicle with an electric motor on the rear axle and
a combustion engine on the front axle. The wheel torque information, provided by electric motor,
is used to early detect excessive wheel slip and improve the accuracy of the estimate. A best-wheel
selection approach is applied as the observation variable of a Kalman filter which reduces the influence
of slipping wheels as well as reducing the computational effort. The performance of the proposed
algorithm is illustrated on a test data recorded at a winter test ground with excellent results, even for
extreme conditions such as when all four wheels are spinning.
Keywords: velocity estimation; Kalman filter; wheel torque; best-wheel speed; slope estimation
1. Introduction
Accurate knowledge of the vehicles longitudinal velocity is essential, for example, wheel slip
control and the slope angle are important for real-life fuel economy optimisation and improved
traction control. The task of velocity estimation is challenging when driving all four wheels
and particularly in slippery conditions.
Direct measurement of the longitudinal velocity, as opposed to estimation, is too expensive
and/or impractical for vehicle applications. Therefore, the longitudinal velocity needs to be
estimated from the wheel speed sensors, accelerometers, wheel torque information as well as
other sensors.
These aforementioned sensor sources each have limitations; the wheel speeds become unre-
lated to the vehicle velocity during excessive wheel slip and time integration of the longitudinal
acceleration accumulates sensor bias causing the estimation to drift. Another source of error
is the gravitational component acting in the direction of the road slope contaminating the
acceleration measurement. Hence, estimation of the road slope angle is necessary.
∗
© 2014 Taylor & Francis


剩余16页未读,继续阅读
资源评论


HelloZZZA
- 粉丝: 0
- 资源: 1









最新资源
- juhua-p8YYy-v0e13a7b5(1).apk
- Neo4j资源:Neo4j.rb的性能测试相关程序
- 排序算法之堆排序算法:用C++语言实现堆排序算法
- 基于Springboot的房屋租赁系统(源代码+论文+说明文档+PPT)-计算机专业精品毕业设计和课程设计
- leidian.py
- 直接插入排序算法:C语言实现直接插入排序算法
- 基于Springboot的大学生就业招聘系统(源代码+论文+说明文档+PPT)-计算机专业精品毕业设计和课程设计
- 基于Vue的H5结婚请帖前端设计源码
- saxaxasxasx
- 基于SSM++jsp的实验室耗材管理系统(源代码+论文+说明文档+PPT)-计算机专业精品毕业设计和课程设计
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


