自动往返电动小汽车
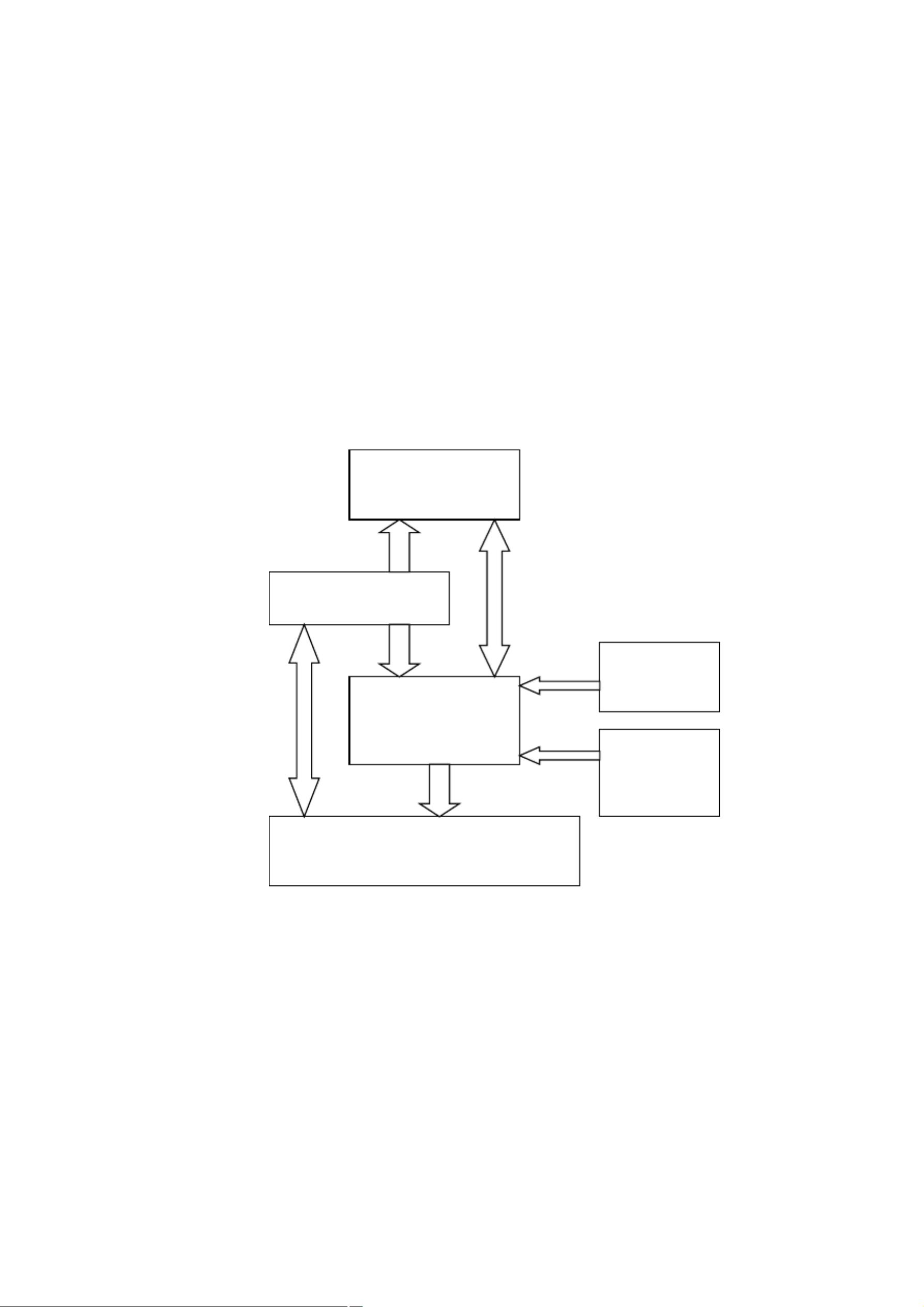
本设计民用 STM32 作为自动往返小汽车的检测和控制核心,辅以传感器、
控制电路、显示电路等外围器件,构成了一个车载控制系统。路面黑线检测使用
反射式红外传感器,利用 PWM 技术动态控制电动机的转速。基于这些完备而可
靠的硬件设计,使用了一套独特的软件算法,实现了小车在限速和压线过程中的
精确控制。电动小汽车能够根据题目要求在直线方向上完成调速、急刹车、停车、
倒车返回等各种运动形式;这辆小车还可以自动记录、显示一次往返时间和行驶
距离,并用蜂鸣器提示返回起点。另外,我们经过 MATLAB 仿真后,成功地实
现了从最高速降至低速的平稳调速。
本系统主要采用模糊控制算法进行速度调节。通过模糊控制和 PWM 脉宽调
制技术的结合,提高了对车位置控制精度,并且实现了恒速控制。
关键词:PWM,STM32F103,电机,传感器
前 言
嵌入式技术依靠其体积小、成本低、功能强等特点,适应了智能化发展的最
新要求。单片机作为控制系统的微处理器,在数据处理和代码存储等方面都已经
无法满足系统的要求,ARM 微处理器资源丰富,具有良好的通用性。Cortex-M3
是 ARM 公司最新推出的第一款基于 ARMv7 体系的处理器内核。它主要针对
MCU 领域,在存储系统、中断系统、调试接口等方面做了较大的改进,有别于
过去的 ARM7 处理器;Cortex-M3 具有高性能、低功耗、极低成本、稳定等诸多
优点,非常适合汽车电子、工业控制系统、医疗器械、玩具等领域。基于 Cortex-M3
内核的 STM32 系列处理器于 2007 年由 ST 公司率先推出,它集先进 Cortex-M3
内核结构、出众创新的外设、良好的功耗和低成本于一体,极大的满足自动控制
系统设计要求。作为先进的 32 位通用微控制器的领跑者,STM32 以其出众的性
能、丰富且灵活的外设、很高的性价比以及令人意外的功耗水准,使其自面世以
来得到众多设计者的青睐,众多行业领导者纷纷选用 STM32 作为新一代产品的
平台。因此将 STM32F103 应用于智能小车的控制系统是一种较好的选择。
基于此,本文提出了一个比较合理的智能小车系统设计方案。整个小车系统
以 STM32F103 芯片为控制核心,附以外围电路,利用红外探测器、触角传感器
采集外界信息和检测障碍物;充分利用 STM32F103 的串口、并口资源和高速的