精品资料
因为本次设计的三自由度机械手主要用来运输 2 流水线的零件,2 者距离
1000mm,这就要求机械手结构简单紧凑,定位精度较高,占地面积小。根据上面
4 种坐标形式,我选择了圆柱坐标形式,这种形式比较符合这次设计的需要。
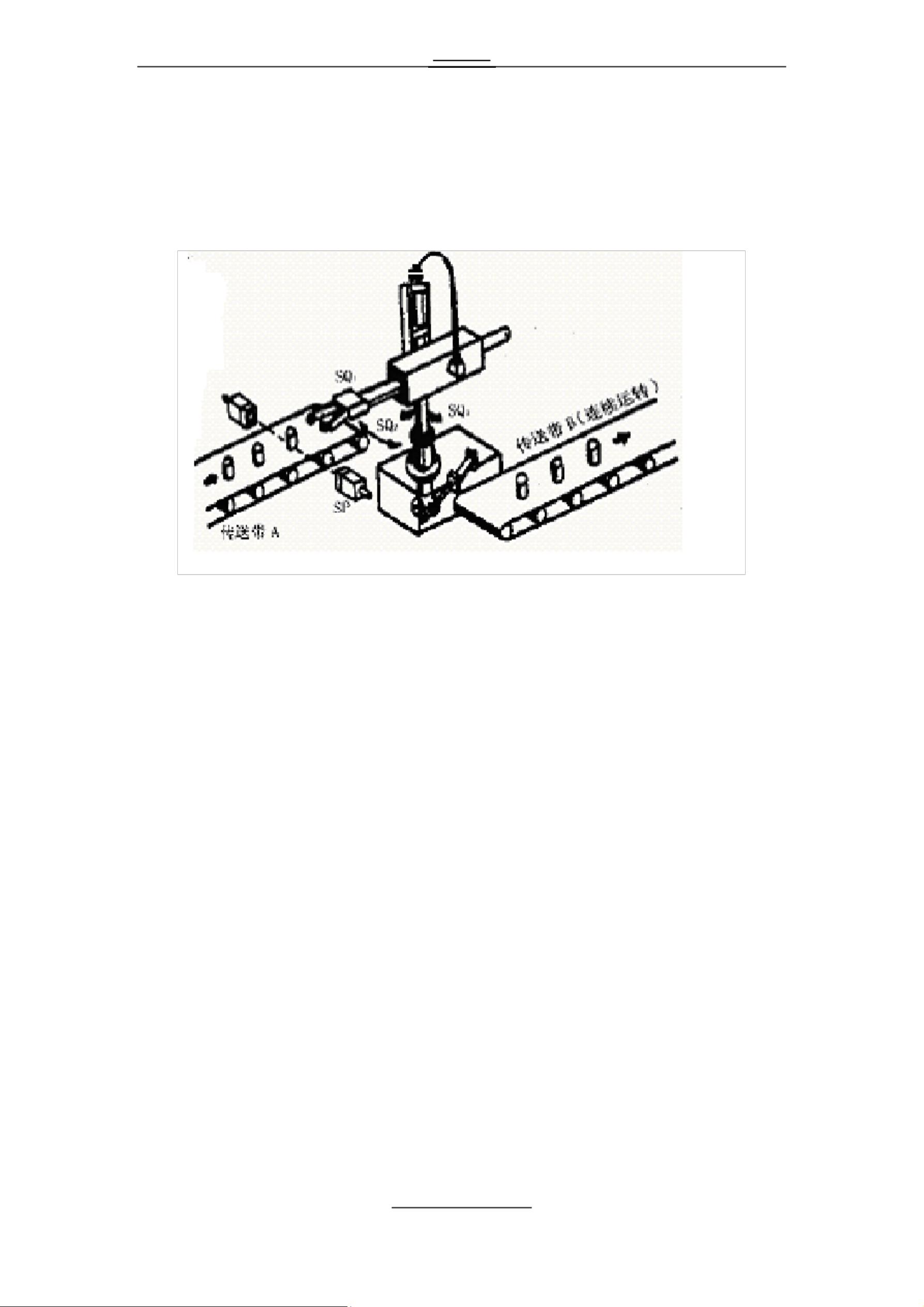
图 1-2-3 是机械手搬运物品示意图。图中机械手的任务是将传送带 A 上的物品
搬运到传送带 B。
图 1-2-3 机械手搬运物品示意图
1.2.3 机械手的主要部件及运动
在圆柱坐在圆柱坐标式机械手的基本方案选定后,根据设计任务,为了满
足设计要求,本设计关于机械手具有 3 个自由度既:手抓张合;手臂回转;手
臂升降 3 个主要运动。本设计机械手主要由 3 个大部件:
(1)手部,采用一个直线液压缸,通过机构运动实现手抓的张合。
(2)腕部,腕部是联结手部和臂部的部件,腕部运动主要用来改变被夹物
体的方位,它动作灵活,转动惯性小。本课题腕部具有回转这一个自由
度,采用一个回转液压缸实现手部回转。
(3)臂部
,
臂是机械手机构的主要执行部件。它的作用是支撑腕部和手
部,并带动它们在空间运动。
(4)机身,机身是直接支承和传动手臂的部件。
1.2.4 机械手的驱动元件
在机器人驱动系统中,使用的电机类型主要有步进电机、直流伺服电机、
交流伺服电机以及最近几年出现的超声波电机和 HD 电动机等几种。
........................................