基于51系列单片机的温度控制系统设计.pdf
版权申诉
61 浏览量
2022-07-02
15:00:42
上传
评论
收藏 1.45MB PDF 举报


目录
摘要................................................................................................................................................... 3
一、 课程设计任务......................................................................................................................... 2
二、 基于 51 系列单片机的温度控制系统设计........................................................................... 2
2.1 方案设计............................................................................................................................ 2
2.1.1 方案选择................................................................................................................. 2
方案一:热电偶采集温度............................................................................................... 2
方案二:数字温度传感器 DS18B20 采集温度............................................................... 2
2.1.2 方案论证................................................................................................................. 2
2.2 基本芯片及 PID 算法简介 ...............................................................................................3
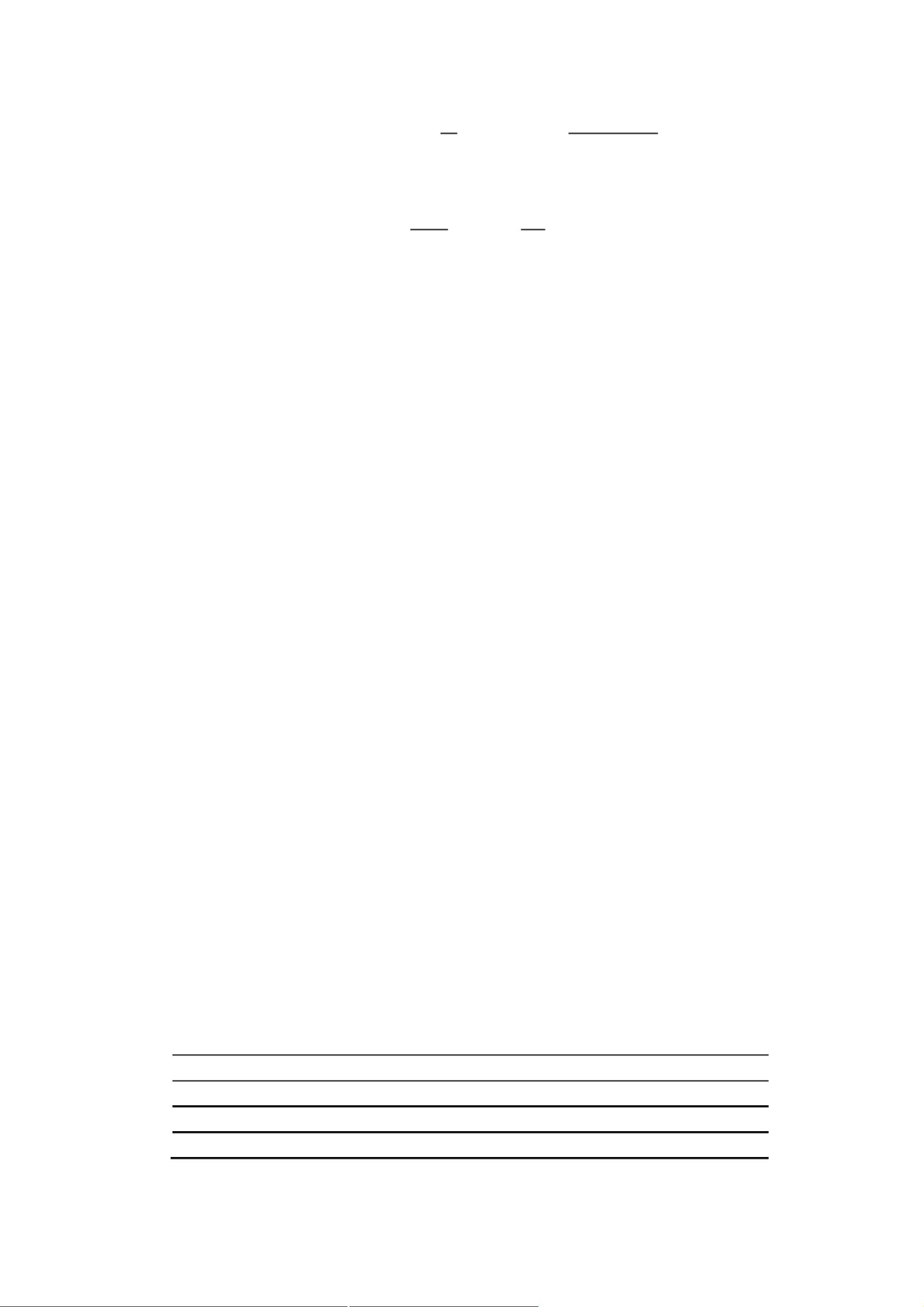
2.2.1 单片机 STC89C52................................................................................................... 3
2.2.2 DS18B20 基本工作原理......................................................................................... 3
2.2.3 PID 算法 ..................................................................................................................4
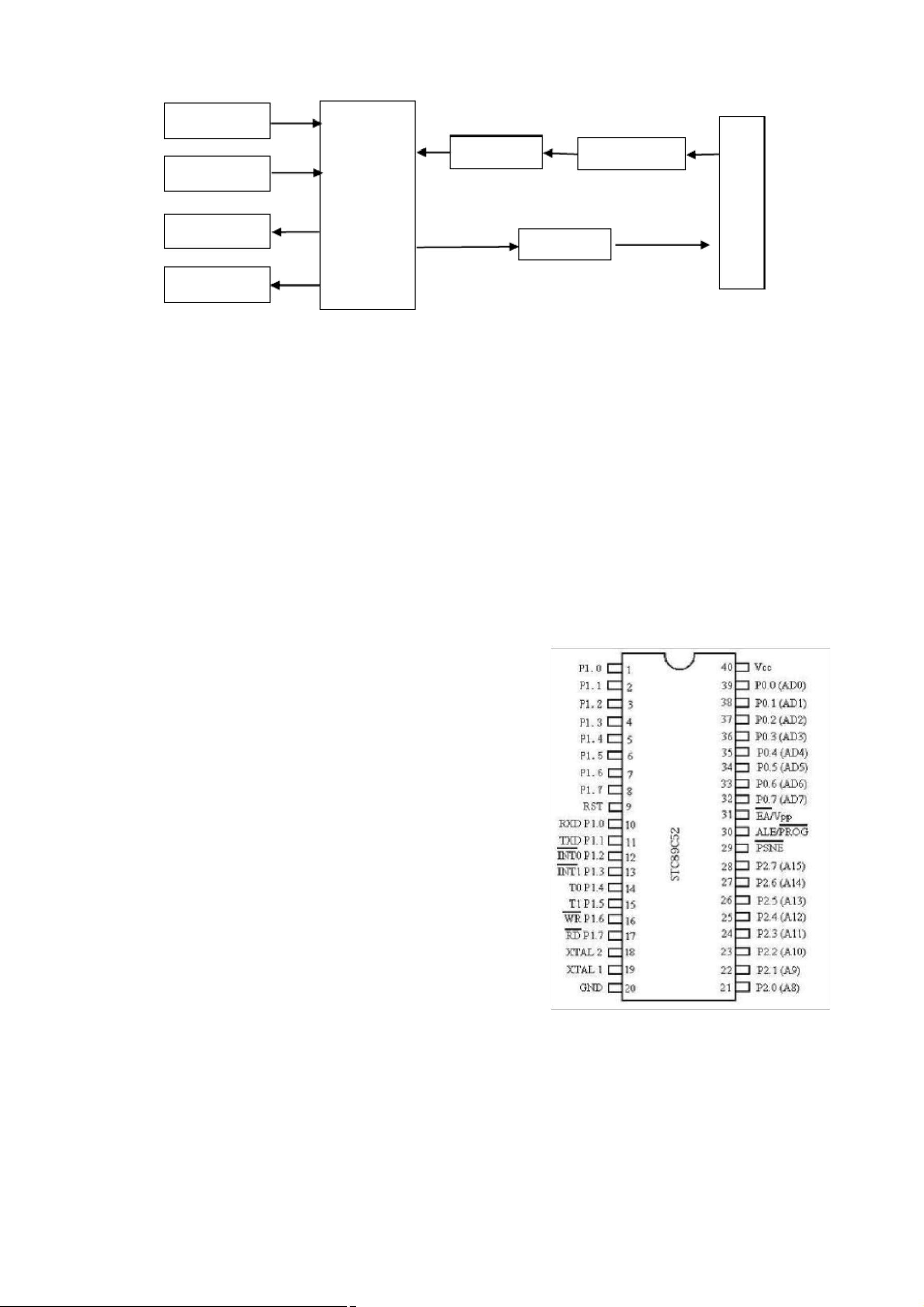
三、 系统硬件设计......................................................................................................................... 6
3.1 数码管显示模块................................................................................................................ 6
3.2 键盘输入模块.................................................................................................................... 7
3.3 温度采集模块.................................................................................................................... 7
3.4 报警模块............................................................................................................................ 8
四、 系统软件设计......................................................................................................................... 9
4.1 主程序流程图.................................................................................................................... 9
4.2 温度检测子程序................................................................................................................ 9
4.3 PID 计算子程序 ............................................................................................................10
4.4 PWM 子程序 .................................................................................................................13
五、 系统功能设计与实现........................................................................................................... 13
5.1 测试系统特性及其传递函数.......................................................................................... 13
5.2 实际温度显示功能的实现.............................................................................................. 14
5.2.1 Proteus 仿真图....................................................................................................... 14
5.2.2 实物图................................................................................................................... 15
5.3 控制温度的设定功能的实现.......................................................................................... 16
5.3.1 Proteus 仿真图....................................................................................................... 16
5.3.2 实物图................................................................................................................... 16
5.3.3 系统调试............................................................................................................... 17
六、 总结....................................................................................................................................... 18
1


剩余27页未读,继续阅读
资源评论













