

1
MAX7219 驱动指南
目录
MAX7219 简介...........................................................................................................................................2
数码管接线 .................................................................................................................................................2
引脚定义与功能 ........................................................................................................................................3
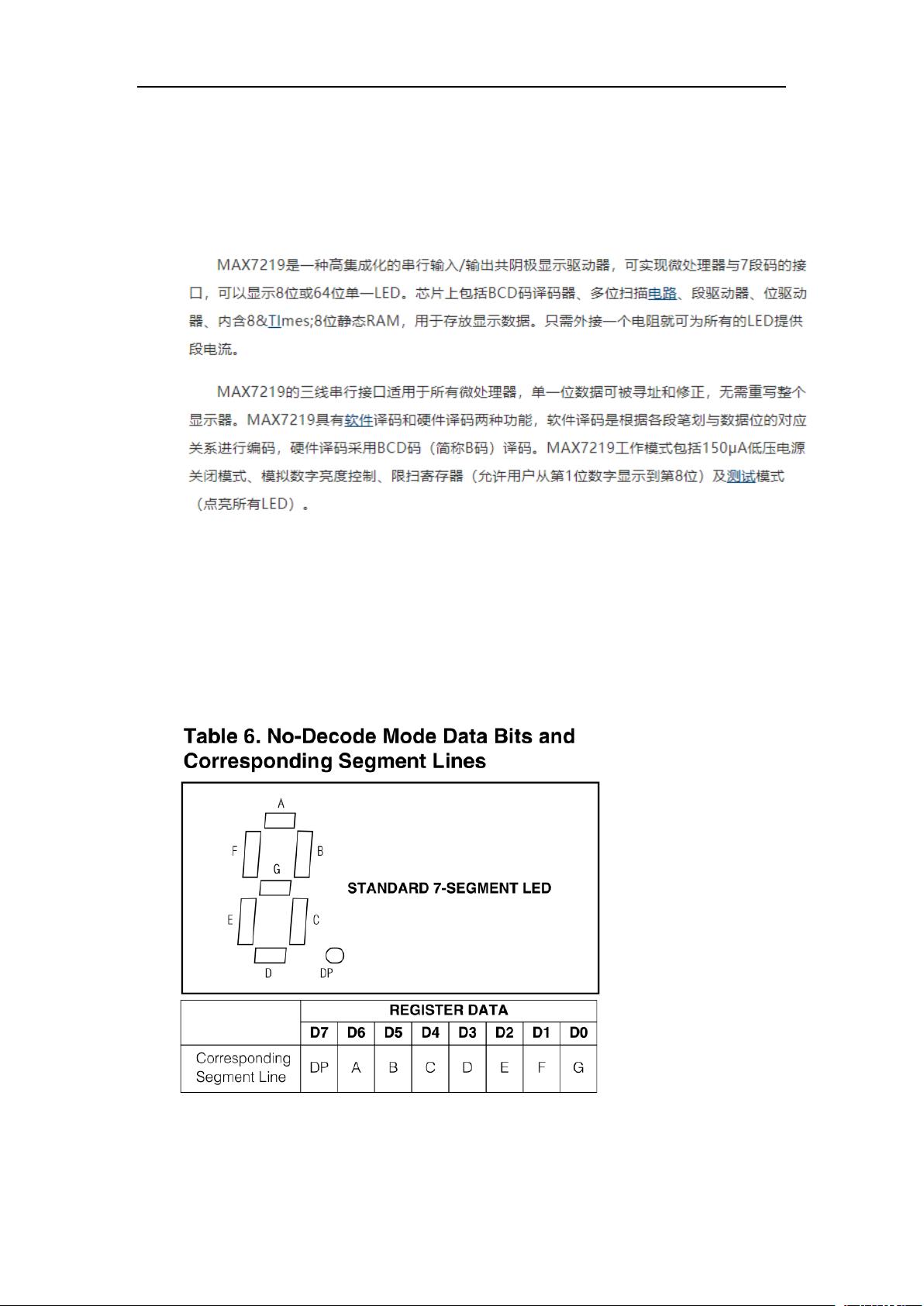
数据格式......................................................................................................................................................4
数据寄存器、控制寄存器......................................................................................................................5
传输时序......................................................................................................................................................6
译码模式控制寄存器(地址码 0x09)..............................................................................................6
亮度控制寄存器(地址码 0x0a) .......................................................................................................8
限制扫描位数寄存器(地址码 0x0b) ....................................................................................................8
显示测试寄存器(地址码 0x0F) .......................................................................................................9
关断模式寄存器(地址码 0x0C) .............................................................................................................9
示例.............................................................................................................................................................10
参考链接
一文教你全面透彻使用 MAX7219 驱动 8 位 LED 数码管
https://baijiahao.baidu.com/s?id=1743172249286220791&wfr=spider&for=pc
欢迎关注 Electrical_IT 的博客 私信交流技术
https://blog.csdn.net/Electrical_IT
剩余10页未读,继续阅读
资源评论


Electrical_IT
- 粉丝: 138
- 资源: 2









最新资源
- Spring Cloud商城项目专栏 049 支付
- sensors-18-03721.pdf
- Facebook.apk
- 推荐一款JTools的call-this-method插件
- json的合法基色来自红包东i请各位
- 项目采用YOLO V4算法模型进行目标检测,使用Deep SORT目标跟踪算法 .zip
- 针对实时视频流和静态图像实现的对象检测和跟踪算法 .zip
- 部署 yolox 算法使用 deepstream.zip
- 基于webmagic、springboot和mybatis的MagicToe Java爬虫设计源码
- 通过实时流协议 (RTSP) 使用 Yolo、OpenCV 和 Python 进行深度学习的对象检测.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


