TB6600HG PWM 斩波型单芯片双极正弦微步步进马达驱动器
需积分: 0 153 浏览量
2023-05-16
16:33:07
上传
评论
收藏 1.12MB PDF 举报


TB6600HG
2016-06-10
1
TOSHIBA BiCD Integrated Circuit Silicon Monolithic
TB6600HG
PWM Chopper-Type bipolar
Stepping Motor Driver IC
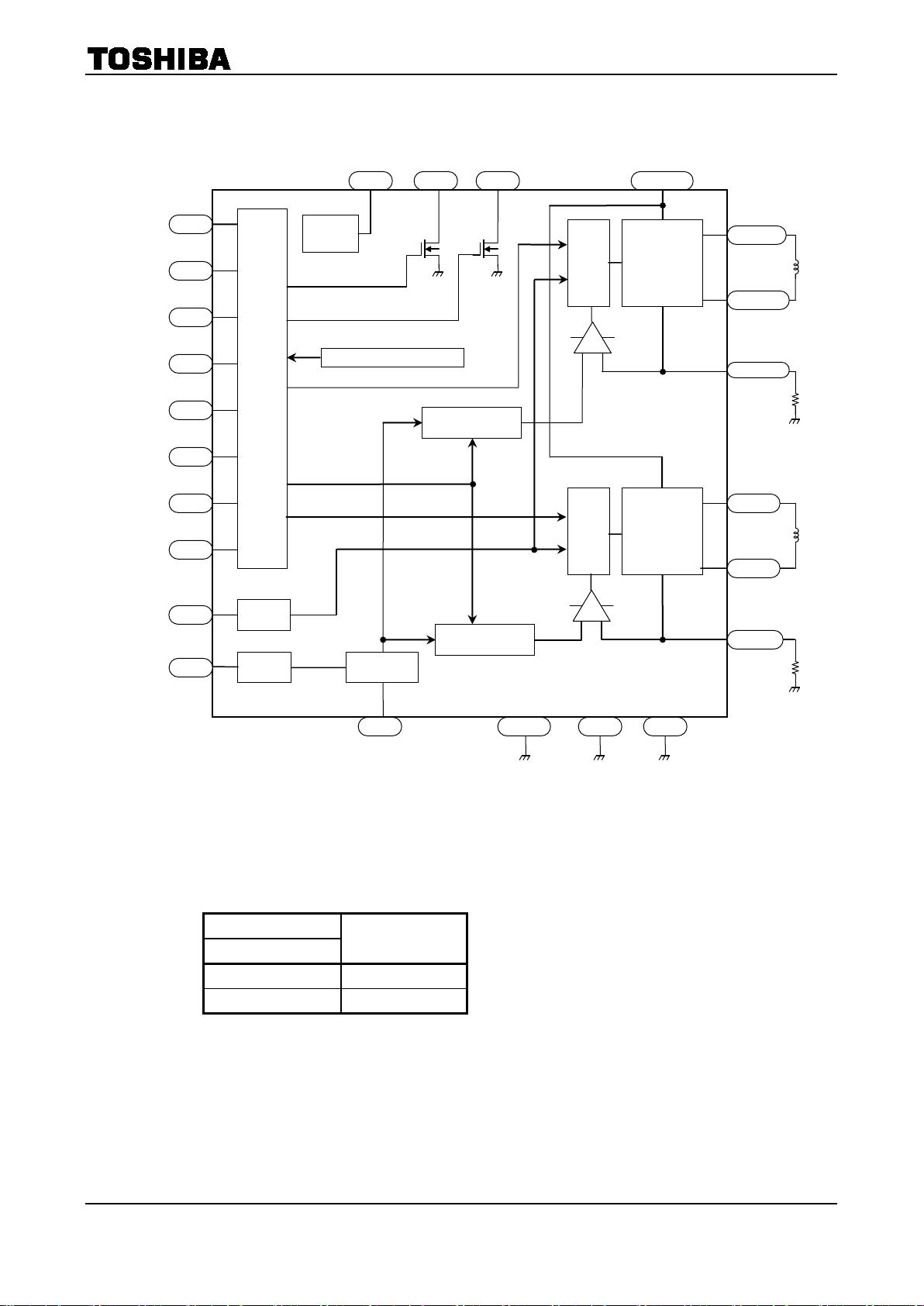
The TB6600HG is a PWM chopper-type single-chip bipolar sinusoidal
micro-step stepping motor driver.
Forward and reverse rotation control is available with 2-phase,
1-2-phase, W1-2-phase, 2W1-2-phase, and 4W1-2-phase excitation
modes. 东芝代理、大量现货:QQ 990123167 13610068393
2-phase bipolar-type stepping motor can be driven by only clock signal
with low vibration and high efficiency.
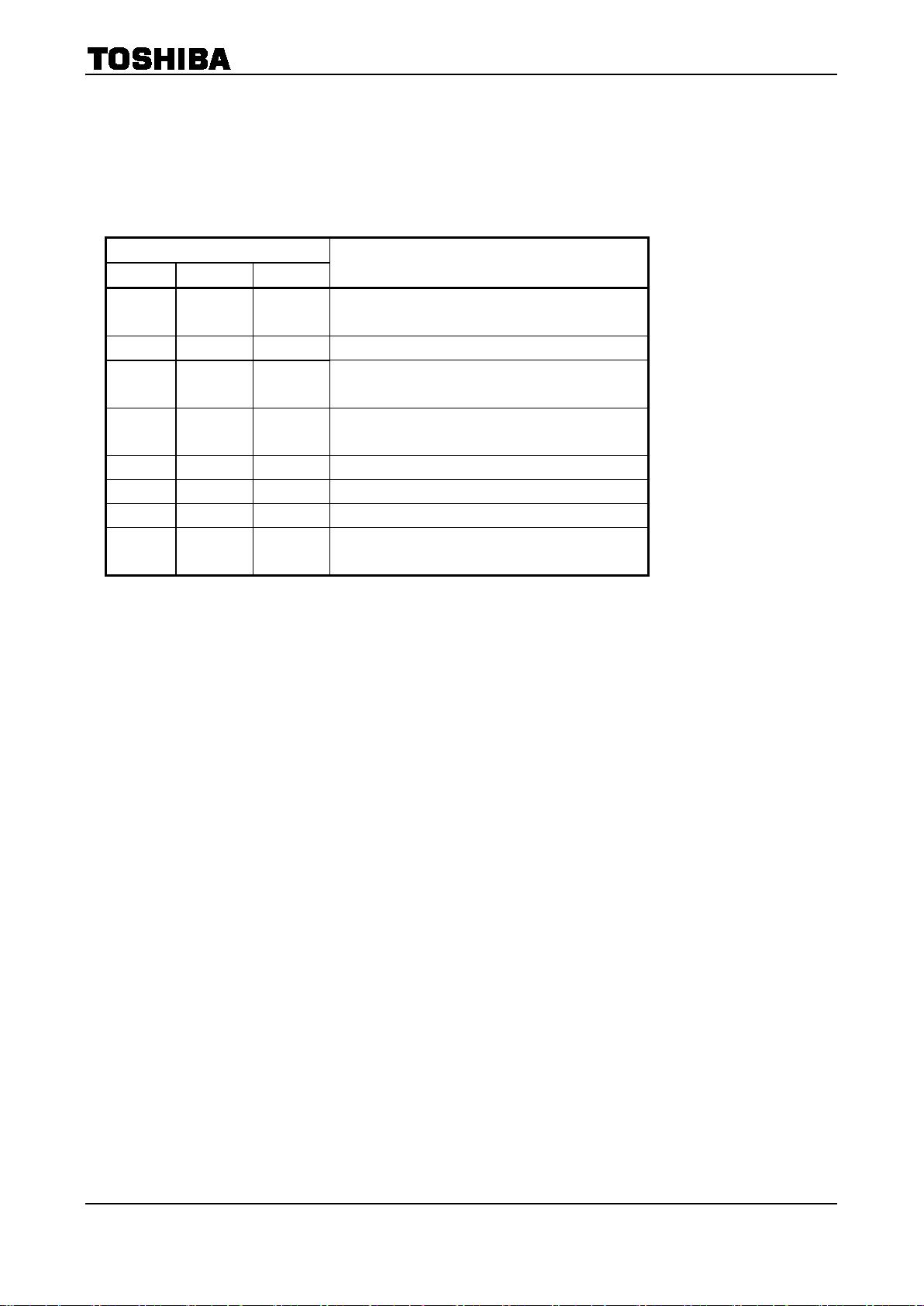
Features
• Single-chip bipolar sinusoidal micro-step stepping motor driver
• Ron (upper + lower) = 0.4 Ω (typ.)
• Forward and reverse rotation control available
• Selectable phase drive (1/1, 1/2, 1/4, 1/8, and 1/16 step)
• Output withstand voltage: Vcc = 50 V
• Output current: I
OUT
= 5.0 A (absolute maximum ratings, peak)
I
OUT
= 4.5 A (operating range, maximal value)
• Packages: HZIP25-P-1.00F
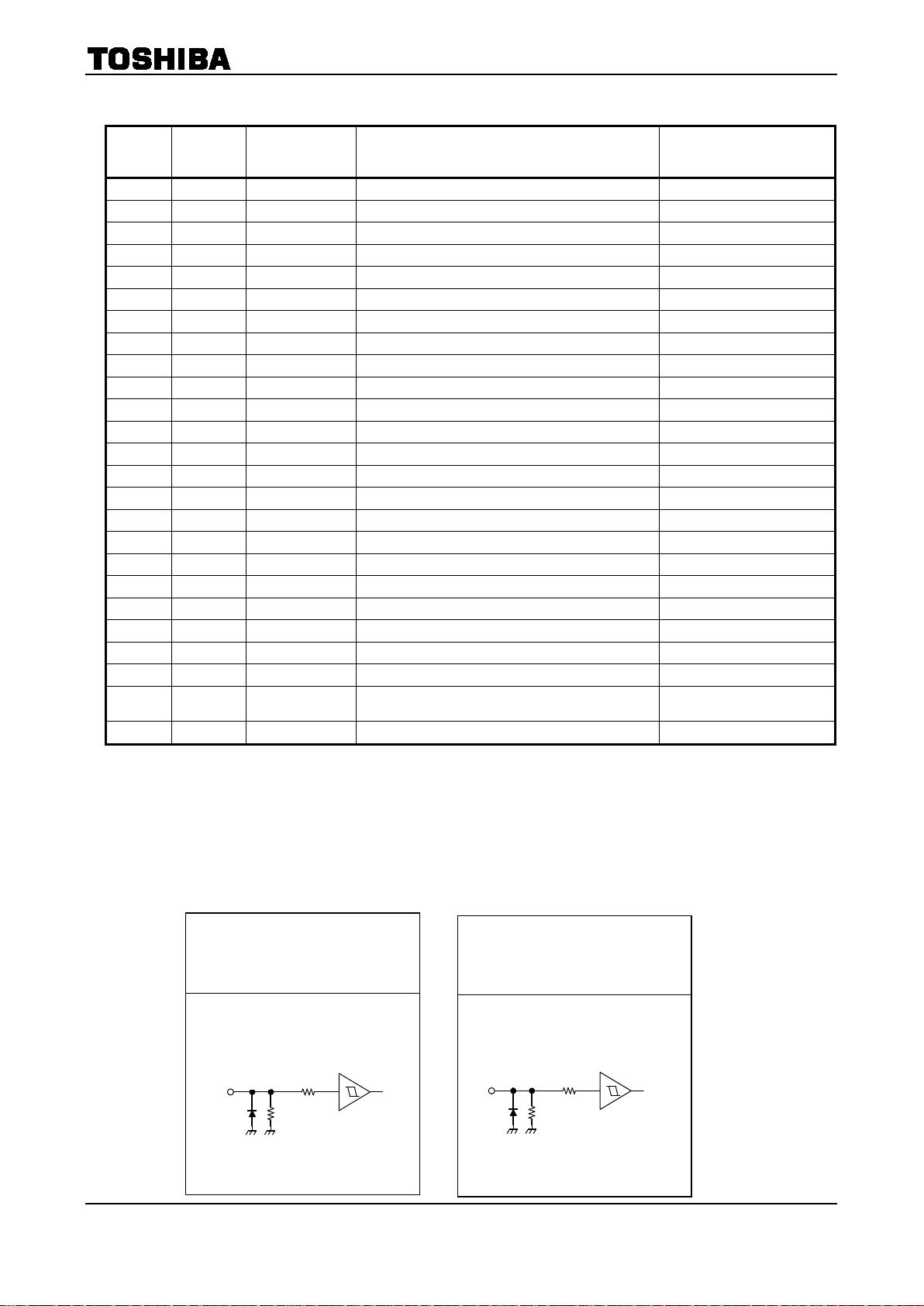
• Built-in input pull-down resistance: 100 kΩ (typ.), (only TQ terminal: 70kΩ(typ.))
• Output monitor pins (ALERT): Maximum of I
ALERT
= 1 mA
• Output monitor pins (MO): Maximum of I
MO
= 1 mA
• Equipped with reset and enable pins
• Stand by function
• Single power supply
• Built-in thermal shutdown (TSD) circuit
• Built-in under voltage lock out (UVLO) circuit
• Built-in over-current detection (ISD) circuit
TB6600HG
Weight:
HZIP25-P-1.00F: 7.7g (typ.)
HZIP25-P-1.00F

剩余34页未读,继续阅读
资源评论


KIOXIA铠侠总代
- 粉丝: 282
- 资源: 30









最新资源
- 937712277954201实习5.word
- 2程序语言基础知识pdf1_1716337722703.jpeg
- 简单的Python示例,演示了如何使用TCP/IP协议进行基本的客户端和服务器通信
- 考试.sql
- keil2 + proteus + 8051.exe
- 1961ee27df03bd4595d28e24b00dde4e_744c805f7e4fb4d40fa3f695bfbab035_8(1).c
- mediapipe-0.9.0.1-cp37-cp37m-win-amd64.whl.zip
- windows注册表编辑工具
- mediapipe-0.9.0.1-cp37-cp37m-win-amd64.whl.zip
- 校园通行码预约管理系统20240522075502
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


