实验 1 熟悉 ROS 操作系统、学习 ROS 常用指令
一、实验目的
掌握 ROS 的安装以及常用命令,具体内容如下:
(1)学会在 ubuntu18.04 系统下安装 ROS。
(2)了解 ROS 基础命令。
(3)运行海龟示例。
二、实验设备
硬件环境:DELL 笔记本
系统环境:VmWare、Ubuntu18.04、ROS Melodic
三、实验内容
1、 安装 ROS
(a)设置安装源
$ sudo sh -c echo deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main
/etc/apt/sources.list.d/ros-latest.list
(b)设置 Key
$ sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key
C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
(c)安装
$ sudo apt update
$ sudo apt install ros-melodic-desktop-full
(d)配置环境变量
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
(e)安装依赖
$ sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
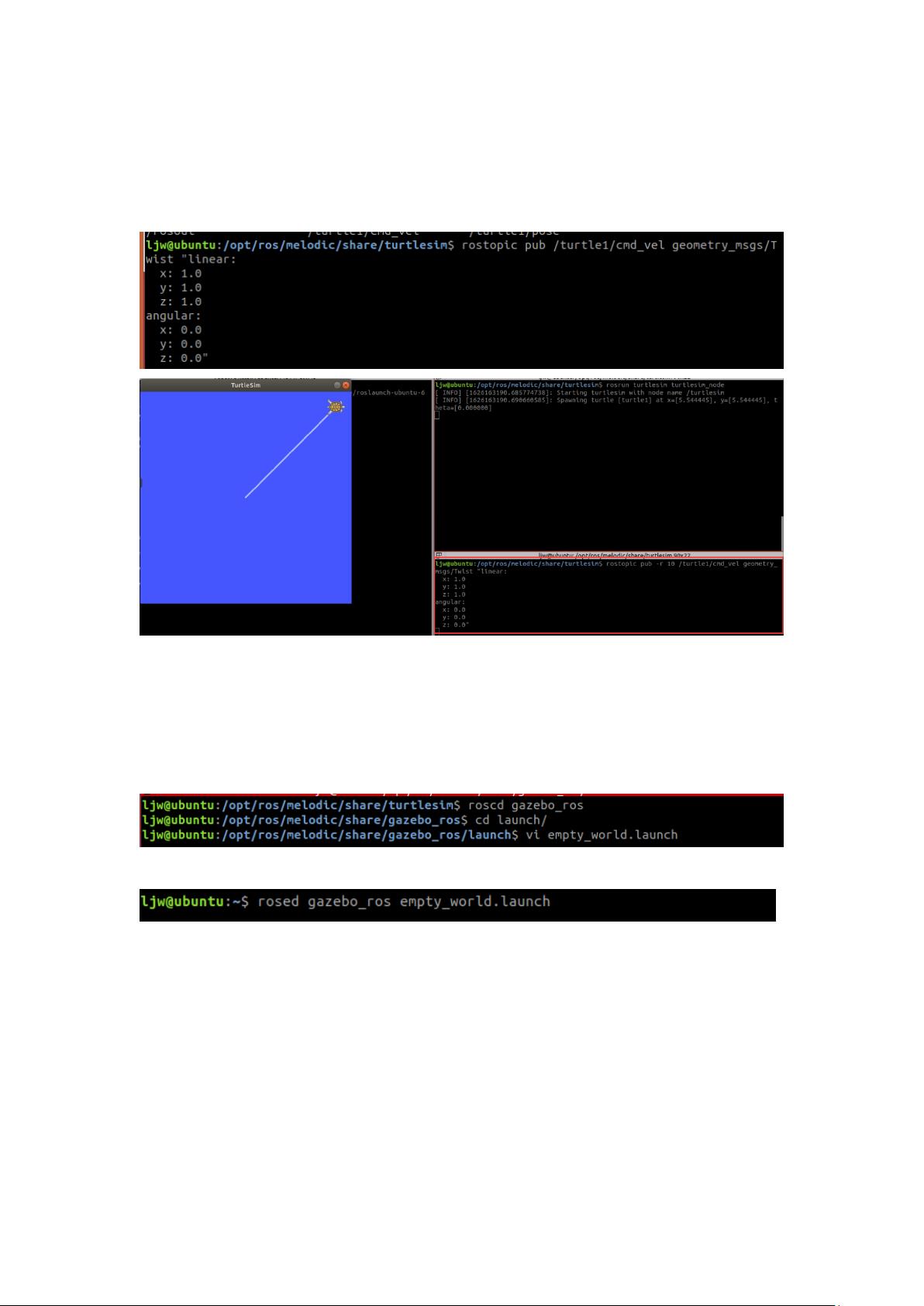
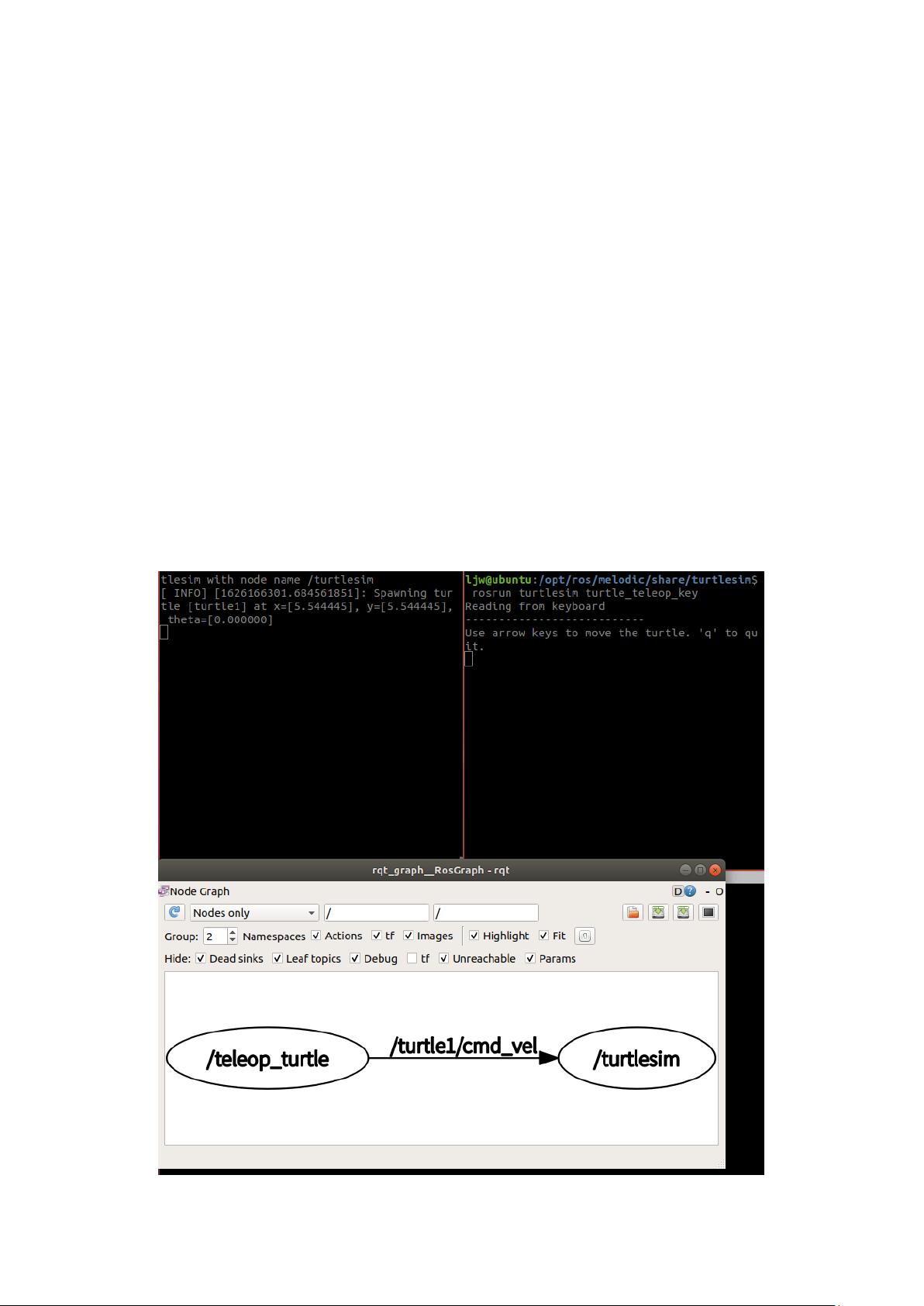
2、 ROS 常用指令以及小海龟示例
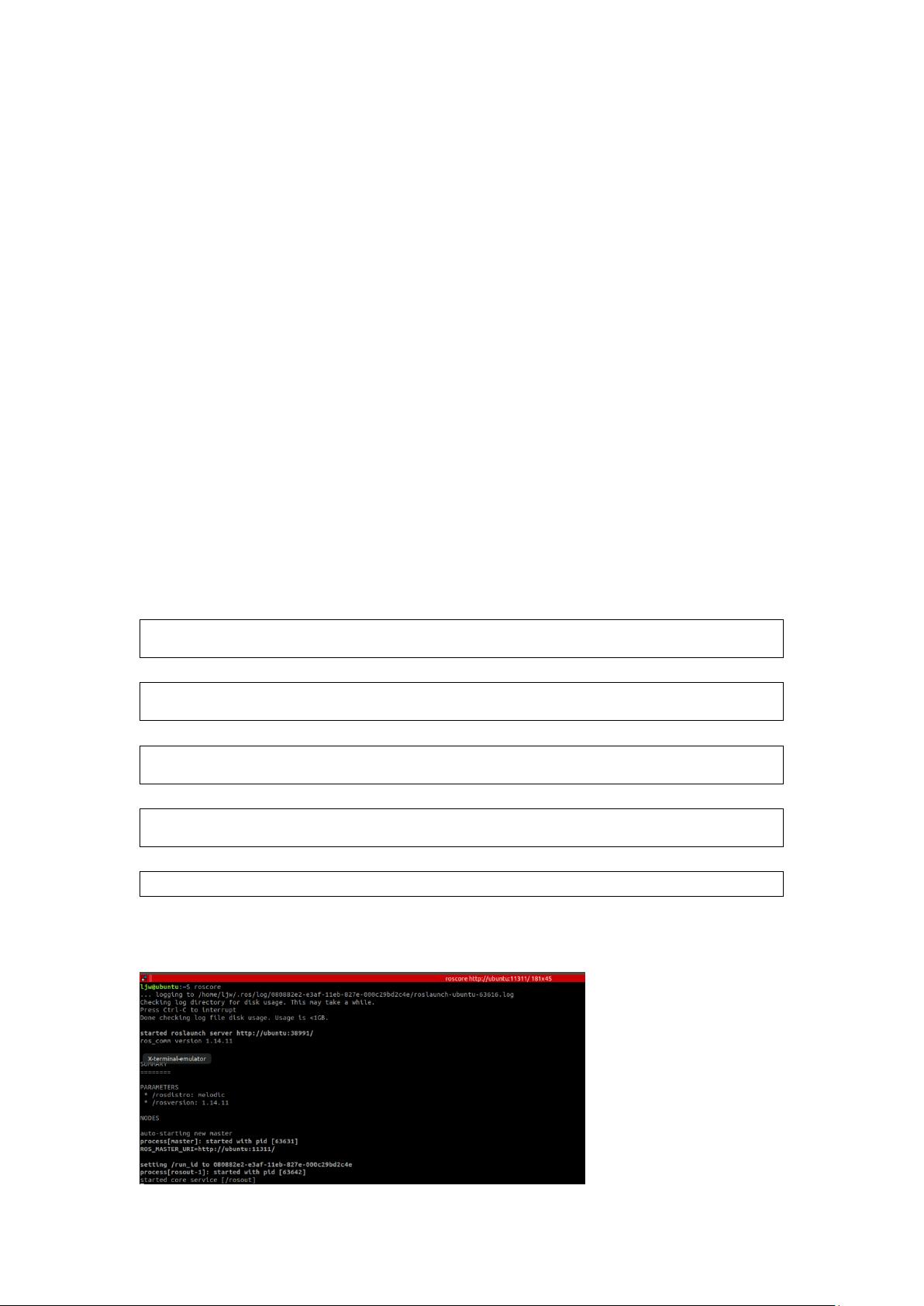
roscore 命令