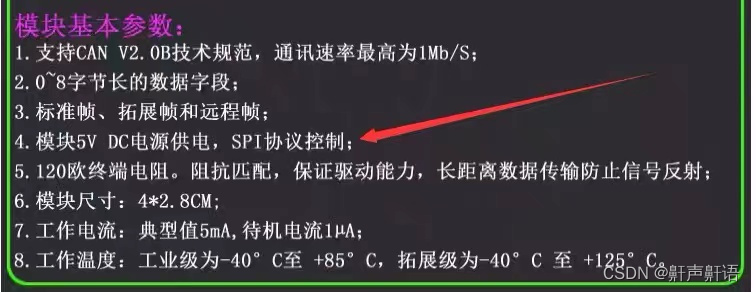
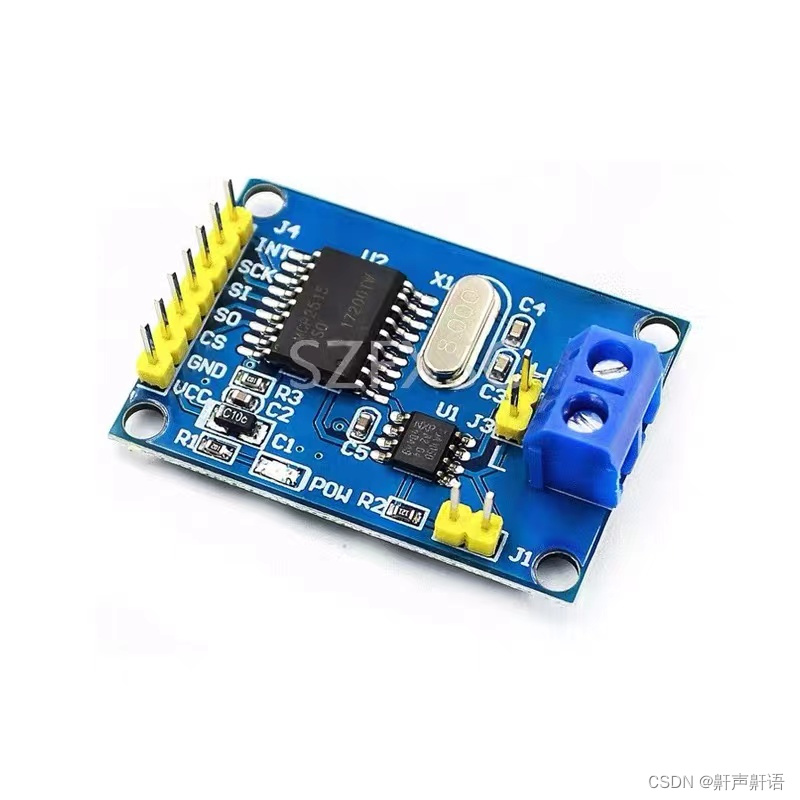
mcp2515是can控制器,
TJA1050是can收发器
如图解释更详细:


相关推荐
YOLOv9有效涨点专栏
Snu77
YOLOv8有效涨点专栏
Snu77
华为OD机试题库2024年
2023面试高手
YOLOv10魔术师
AI小怪兽
搜索推荐系统相关技术业务落地方案及码源
汀、人工智能
YOLOv8原创自研
AI小怪兽
OpenCV图像处理、计算机视觉实战应用
Zero___Chen
YOLOv8魔术师
AI小怪兽
YOLOv8改进实战
迪菲赫尔曼
车载电子电气架构
车载诊断技术
【付费专栏】CANoe从入门到精通
汽车通信技术
芯片验证自学入门教程
小白蒋博客
那些年踩过的坑
科技之光666
FPGA接口篇
子墨祭
运动规划实战精讲
Mr.Winter`
RK3568平台开发入门到实战项目专栏
内核笔记
YOLO小目标检测
AI小怪兽
车芯 SA8295P 源码分析
菩 提
芒果YOLOv8原创改进
芒果汁没有芒果
Diffusion Models与深度学习
沉迷单车的追风少年
大模型微调部署实战及类GPT工具的高效使用
herosunly
YOLOv10改进实战
迪菲赫尔曼
YOLOv9魔术师
AI小怪兽
GJB体系
AbelZ_01
FPGA求职核心竞争力
宁静致远dream
AutoSAR系列教程
哒佬
★MATLAB算法仿真经验
fpga和matlab
- 博客详情
- 1文章二:华为晟腾310b的Atlas 200I A2加速模块进行视频的AI分析,硬件使用的是Oringepi alpro,mxvision框架图,yolo系类部署(推荐环境安装)
- 2文章一:华为晟腾310b的Atlas 200I A2加速模块进行视频的AI分析,硬件使用的是Oringepi alpro(推荐环境安装)
- 3华为昇腾AI处理器,atc模型转换和推理过程,华为的CANN库对标的是NVIDIA的cuda,所以在华为昇腾AI处理器上安装了CANN后,就可以直接使用pytorch了,以及推理框架(参考学习)
- 4华为晟腾AI芯片的控制器环境安装CANN,以及ATC模型转换工具--onnx模型转华为的om模型(模型转换)
- 5自动驾驶框架:自动驾驶汽车定位-感知-规划-决策-控制概述,按照我的架构图理解:决策决定的是速度,规划决定的是路径(架构理解推荐)
- 6conda配置不同版本的python及依赖库--conda conda conda
- 7玩转Omniverse | 将FBX文件导入Omniverse View,以及step等3D格式如何转换为USD文件的过程
- 8下载的ros工程如何运行,ros项目运行方法
- 9ros来保存图像和保存记录视频的方法---gmsl相机保存视频和图片
- 10ros快速完成----摄像头标定--camera_calibration--亲测有效,商业方案,以及畸变矫正系数和deepstream中的畸变如何对应---畸变矫正的参数
- 11pip安装python包到指定python版本下
- 12tensorrtx加速推理后,如何把80个分类转换为自己的分类个数
- 13mcp2515和TJA1050的区别是什么?
- 14最近测试心得---少走弯路
- 15jetson nano用PAC9685,并且用占空比来控制直流电机,完整代码-----(推荐测试)----推荐adafruit
- 16python的socket接收数据
- 17GStreamer Plugin之Gst-nvdewarper
- 18基于视觉感知,动态实现ROI感兴趣区域的规划
- 19deepstream支持usb相机,支持GMSL相机的方法,以及错误排查
- 20capsfilter和x264enc和nvv4l2h264enc的区别
- 21如何查看相机的配置信息,以及获取相机当前状态信息---deepstream
- 22GPRMC常用于GPS设备串口输出的数据,GPFDP常用于惯导输出的数据,收到数据为空的时候,大概率信号问题(亲测有效)
- 23ubuntu设置软件自启动的方法步骤,亲测有效
- 24动态调整窗口大小,调整视频大小,以及在视频中显示的矩形框的大小,防止可能会出现绘制信息不完整的情况
- 25udp和tcp自己的理解
- 26jetson nano如何读取pwm波信号?通过编码器读取车速,使用sbus串口读取,解决方案
- 27mqtt数据转换位json格式转换在线工具,在线编辑生成json,以及json格式讲解Json数据格式要求
- 28大端和小端的解释(推荐),简单实用,举例讲解,彻底讲懂大小端,can通讯
- 29gstreamer快速读取rtsp/usb Gmsl2网络相机数据流,并且显示,加速读取,实时性高
- 30deepstream,gstreamer指令实现pipeline,进行视频的发布,简单测试可以
- 31cv::imshow(“RGB“,frame);显示的时候会有两个窗口,怎么设置呢?如何消除黑框,多线程监听键盘事件,关闭窗口
- 32windows下用ffmpeg读取网络相机视频流GPU加速,本来网络视频流有个200ms延迟;发送在加上10多ms,感觉延迟一下子就出来了。不加socket tcp发送消息很流畅
- 33deepstream的卸载和安装,从deepstream6.1升级到deepstream6.2的步骤,适合jetson平台
- 34DeepStream系列之Triton部署模型,nvinfer和nvinferserver的区别,triton如何使用推理服务器?
- 35deepstream设置全屏full screen的方法,nvdrmvideosink nvoverlaysink nveglglessink nv3dsink这几个插件的作用?(推荐)
- 36windows跨线程之间的通讯解决方法一共有3种
- 37Jetson nano 进阶教程4_通过IIC输出PWM,Jetson nano使用PCA9685驱动舵机(推荐)
- 38【无标题】测试pwm在jetsonnano中
- 39BCM和board的引脚的区别是什么?如何查看GPIO的BCM和board之间的关系
- 40User pwm是如何控制舵机转动的?正转,反转?