# ROS Control Center
This control center is a universal tool for controlling robots running ROS. It runs in the browser using a websocket connection and `roslibjs` from [RobotWebTools](http://robotwebtools.org).
[](http://pantor.github.io/ros-control-center)
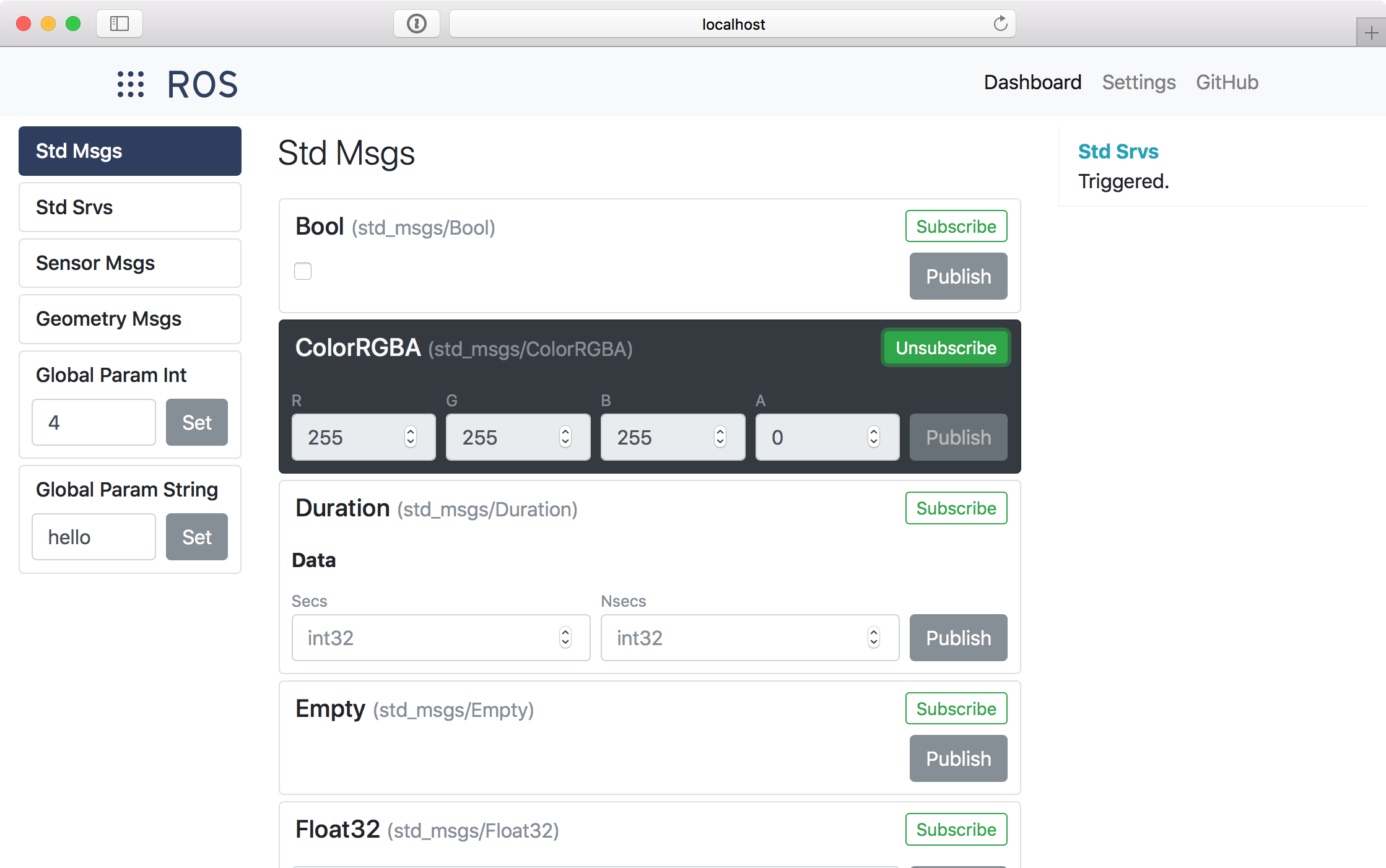
In general, ROS Control Center offers an easy way to
- show nodes, topics and service names.
- subscribe and publish messages.
- call services.
- show and change parameters.
Further features like a console (rosout by default) output, a battery status view, a camera stream view or an advanced mode for better usability are implemented. [Check it out!](http://pantor.github.io/ros-control-center)
## Installation
On your ROS robot, the `rosbridge_suite` from [Robot Web Tools](http://robotwebtools.org) needs to run. So to use the control center with your existing project, call `roslaunch rosbridge_server rosbridge_websocket.launch` to launch the websocket server. The control center runs on any computer (in particular without ROS...) in the same network. Open the ROS Control Center at [https://pantor.github.io/ros-control-center](http://pantor.github.io/ros-control-center). In the settings tab, you need to enter the IP address and port of your robot. Open the `Control` tab and reload.
## Features
You can have multiple saved settings for quick changes and several robots.
ROS Control Center supports images and camera streams via the `web_video_server` package. If camera and camera info messages are published according to the `web_video_server` standards, the stream is shown with the settings.
For your own custom message and service types, you can download this repository and start a server via `http-server` in the console. Then, navigate to `index.html` in a browser. You can add individual `html` templates into the `app/topics/` or `app/services/` folder. The path of your file must correspond to the ROS service or message type name. See the included ROS common messages and standard services as an examples. In your html file, you can write `AngularJS` code for additional customizing and formatting.
The right sidebar shows a logger output (`rosout` by default). On the left, group names are shown. ROS topics,
services and parameters can be grouped together for a better overview. This works as follows:
- Every topic, service or parameter name should correspond to `/group-name/element-name` like a URL. Global parameters should have no group name and are shown below the group list on the left side.
- Every element name should start with a capital letter, as they are shown in the normal view mode. All elements (including the lowercase-names from system services, topics and parameters) can be shown by enabling the `advanced` view mode.
In the right bottom corner, a battery status bar can be shown; the battery topic can be adapted in the settings tab.
## Contributing
For development, [Node.js](https://nodejs.org/en/) needs to be installed. Via `npm install` it will automatically download all development dependencies (from `package.json`). Type `npm start` in the terminal for a live development server. With `vagrant ssh` and `roslaunch ros_test_project main.launch`, you can start a test project in a virtual ubuntu machine.
ROS Control Center depends on:
- [Angular](https://www.angular.io/) as the general JavaScript and routing framework.
- [Bootstrap](https://getbootstrap.com/) for design.
- [roslib.js](https://github.com/RobotWebTools/roslibjs) for ROS connection.
Contributions are always welcome!
## License
ROS Control Center is released with a BSD license. For full terms and conditions, see the [LICENSE](https://github.com/pantor/ros-control-center/blob/master/LICENSE) file.
## Contributors
See [here](https://github.com/pantor/ros-control-center/graphs/contributors) for a full list of contributors.
ros-control-center, 基于web的ROS机器人控制中心.zip

需积分: 43 122 浏览量
2019-09-18
02:58:32
上传
评论 4
收藏 349KB ZIP 举报
 ros-control-center.zip (56个子文件)
ros-control-center.zip (56个子文件)  ros-control-center-master
ros-control-center-master  Vagrantfile 384B package.json 2KB tslint.json 3KB ros_test_project launch main.launch 615B
Vagrantfile 384B package.json 2KB tslint.json 3KB ros_test_project launch main.launch 615B CMakeLists.txt 6KB scripts node_sensor_msgs.py 2KB node_geometry_msgs.py 2KB node_std_srvs.py 617B node_std_msgs.py 2KB package.xml 2KB .angular-cli.json 1KB LICENSE 1KB package-lock.json 488KB src typings.d.ts 104B tsconfig.app.json 209B assets
CMakeLists.txt 6KB scripts node_sensor_msgs.py 2KB node_geometry_msgs.py 2KB node_std_srvs.py 617B node_std_msgs.py 2KB package.xml 2KB .angular-cli.json 1KB LICENSE 1KB package-lock.json 488KB src typings.d.ts 104B tsconfig.app.json 209B assets  ros.svg 3KB
ros.svg 3KB screenshot.png 260KB ros-logo.svg 1KB
screenshot.png 260KB ros-logo.svg 1KB index.html 333B tsconfig.spec.json 302B app parameter parameter.component.css 0B parameter.component.ts 595B parameter.component.html 405B type type.component.css 0B type.component.spec.ts 614B type.component.html 1KB type.component.ts 1KB app.d.ts 421B dashboard dashboard.component.ts 9KB dashboard.component.css 296B dashboard.component.html 3KB humanize.pipe.spec.ts 195B app.module.ts 1KB humanize.pipe.ts 320B settings settings.component.html 4KB settings.component.ts 1KB setting.ts 825B settings.component.css 0B service service.component.html 622B service.component.ts 922B service.component.css 0B app.component.ts 169B app.component.html 874B topic topic.component.html 816B topic.component.css 0B topic.component.ts 981B app-routing.module.ts 538B main.ts 336B styles.css 494B polyfills.ts 3KB environments environment.ts 387B environment.prod.ts 51B tsconfig.json 385B .gitignore 527B README.md 4KB .editorconfig 245B
index.html 333B tsconfig.spec.json 302B app parameter parameter.component.css 0B parameter.component.ts 595B parameter.component.html 405B type type.component.css 0B type.component.spec.ts 614B type.component.html 1KB type.component.ts 1KB app.d.ts 421B dashboard dashboard.component.ts 9KB dashboard.component.css 296B dashboard.component.html 3KB humanize.pipe.spec.ts 195B app.module.ts 1KB humanize.pipe.ts 320B settings settings.component.html 4KB settings.component.ts 1KB setting.ts 825B settings.component.css 0B service service.component.html 622B service.component.ts 922B service.component.css 0B app.component.ts 169B app.component.html 874B topic topic.component.html 816B topic.component.css 0B topic.component.ts 981B app-routing.module.ts 538B main.ts 336B styles.css 494B polyfills.ts 3KB environments environment.ts 387B environment.prod.ts 51B tsconfig.json 385B .gitignore 527B README.md 4KB .editorconfig 245B资源评论













