OptimPID: A MATLAB Interface for
Optimum PID Controller Design
⋆
Dingy¨u Xue
∗
YangQuan Chen
∗∗
∗
School of Information Science and Engineering
Northeastern University, Shenyang 110004, P R China
(e-mail: xuedingyu@mail.neu.edu.cn).
∗∗
Department of Electrical & Computer Engineering
Center for Self-Organizing & Intelligent Systems (CSOIS)
Utah State University, Logan, UT 84322-4120, USA
(e-mail: yqchen@ieee.org).
Abstract: In the paper, a MATLAB/Simulink based graphical user interface OptimPID is
presented for designing optimum PID controllers of different types, under different criteria.
The user is required only to specify the plant, linear and nonlinear, in a Simulink model, and
the controller can be optimized in a visual way. Illustrative examples of optimum PID design
are given and the controllers designed are much better than the existing algorithms and the
leading-edge tools.
Keywords: PID controller, optimum PID, optimal control, optimization, graphical user
interface, global optimization, ITAE criterion, integral performance indices, actuator
saturation, MATLAB and Simulink
1. INTRODUCTION
Since PID-type controllers are widely used in process in-
dustry, there are a great amount of published algorithms
and applications of PID controllers, see O’Dwyer (2003),
˚
Astr¨om and H¨agglund (1995), Johnson and Moradi (2005),
Silva et al. (2005), and some of the tuning algorithms
collected in the books are already adopted in real ap-
plications. There are of course limitations in most of the
existing tuning formula, such that
(1) Most of the available tuning algorithms are based on
the assumption that the plant models are linear and
time invariant. If there are nonlinearities in the plant
model, or with actuator saturation in the controller,
the existing methods can no longer be used.
(2) Most of the available design algorithms are estab-
lished on the approximation of the plants to cer-
tain typical forms such as FOPDT given by G(s) =
ke
−τ s
/(T s + 1), not the actual plants. If the plants
cannot be approximated well with those model for-
mats, good controllers may not be designed using the
existing algorithms.
(3) The qualities of the proposed algorithms are not
always good, and some of the published algorithms
may even give misleading results.
Thus, it is more important to have a design tool for
designing optimum conventional PID controllers for the
actual plants directly. Also since actuator saturation is
usually unavoidable in real process control systems, and
there may also be nonlinearities in the plants, nonlinear
⋆
Supported financially by the National Natural Science Foundation
China, under Grant 61174145.
behaviors should not be neglected. There are attempts
to solve similar problems, for instance, the leading-edge
interactive automated tuning facilities and the function
pidtune() provided in new versions of Control System
Toolbox of MATLAB, in MathWorks Inc (2011a). Unfor-
tunately, the tools are not quite good for solving the above
problems. Besides, they are not suitable for unstable or
nonlinear plants, and the facilities are not quite handy for
unexperienced users.
In this paper, a MATLAB/Simulink based graphical user
interface, named OptimPID, is developed and presented
for optimum conventional PID controller design in servo
control systems. Integral performance indices are used,
and the most meaningful criterion is recommended. The
user needs only to provide the plant in a Simulink model,
and OptimPID interface can be used to find the optimum
parameters in a visual way. Different types of integral
performance indices in servo control systems are summa-
rized and commented in Section 2. In Section 3, a brief
tutorial and descriptions to OptimPID is given, and in
Section 4, some illustrative examples are given to show the
benefit of the proposed interface. Also the examples and
designed controllers can be used as benchmarks for further
research on PID controller design. Global optimization
tools can also be used with extra toolboxes such as Global
Optimization Toolbox in MathWorks Inc (2011b), GAOT
in Houck et al. (1995) and PSOt in Birge (2003).
2. INTEGRAL PERFORMANCE INDICES
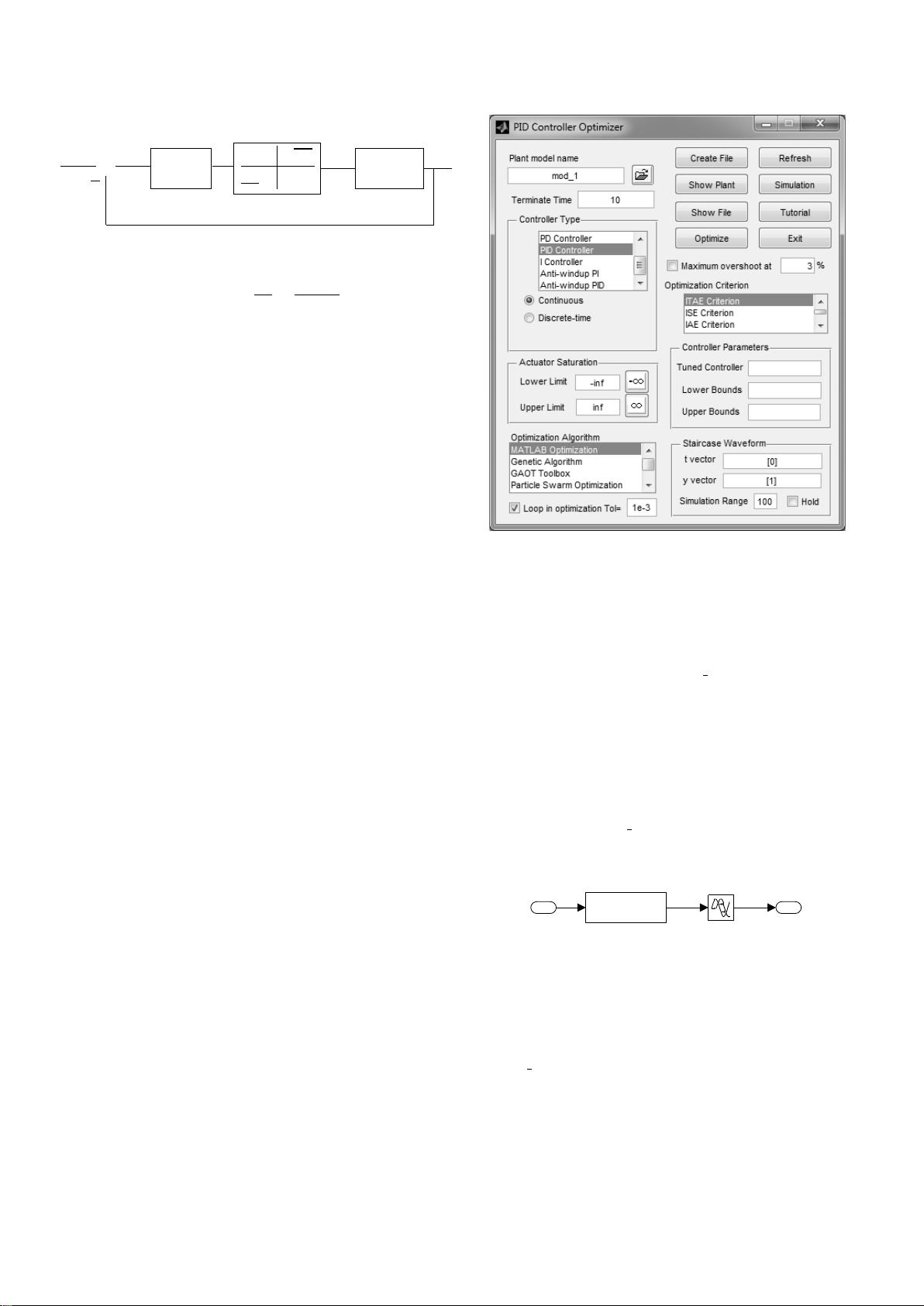
A typical PID control framework for process system is
shown in Fig. 1, where the PID controller is often followed
by an actuator saturation, |u(t)| ≤ u
m
. The actuator
saturation is practical in real-world PID control systems.
This paper is accepted for publication at IFAC Conference on Advances in PID Control, PID'12, Brescia, 28-30 March 2012