一. 课程设计的目的与要求:
1. 掌握单回路控制系统整定的方法
2. 掌握 PID 参数对控制品质的影响规律
3. 运用相关软件开发单回路控制镇定程序
二. 设计正文
1. PID 参数的工程整定法
本设计采用实验法整定 PID 参数,主要用两种方法,即试凑法和 Ziegler-Nichol 曲线响
应法及临界比例度法。
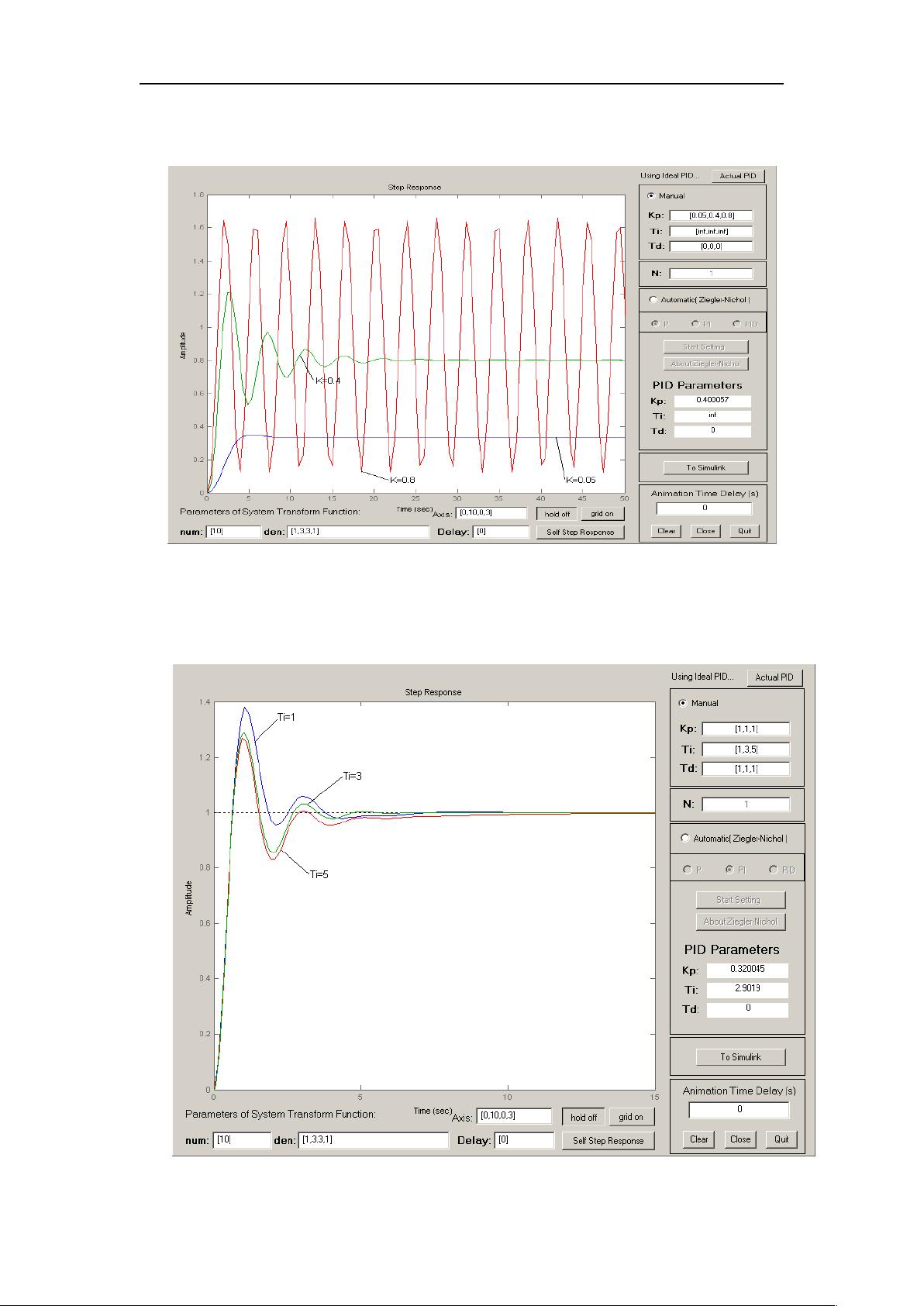
1) 试凑法就是通过仿真或实际运行,观察系统对典型输入作用的响应曲线,根据各
控制参数对系统的影响,反复调节试凑,直到满意为止,从而确定 PID 参数。
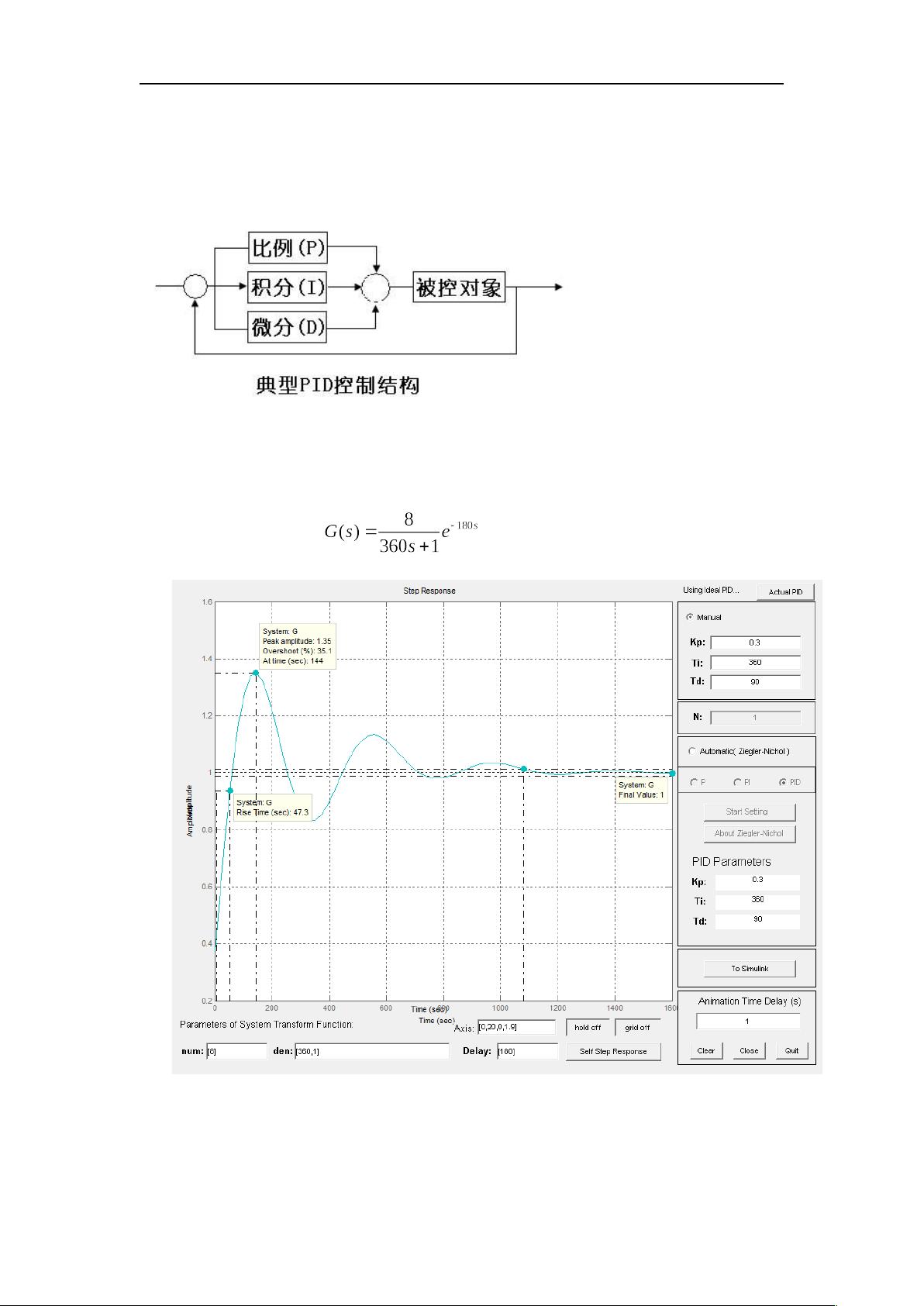
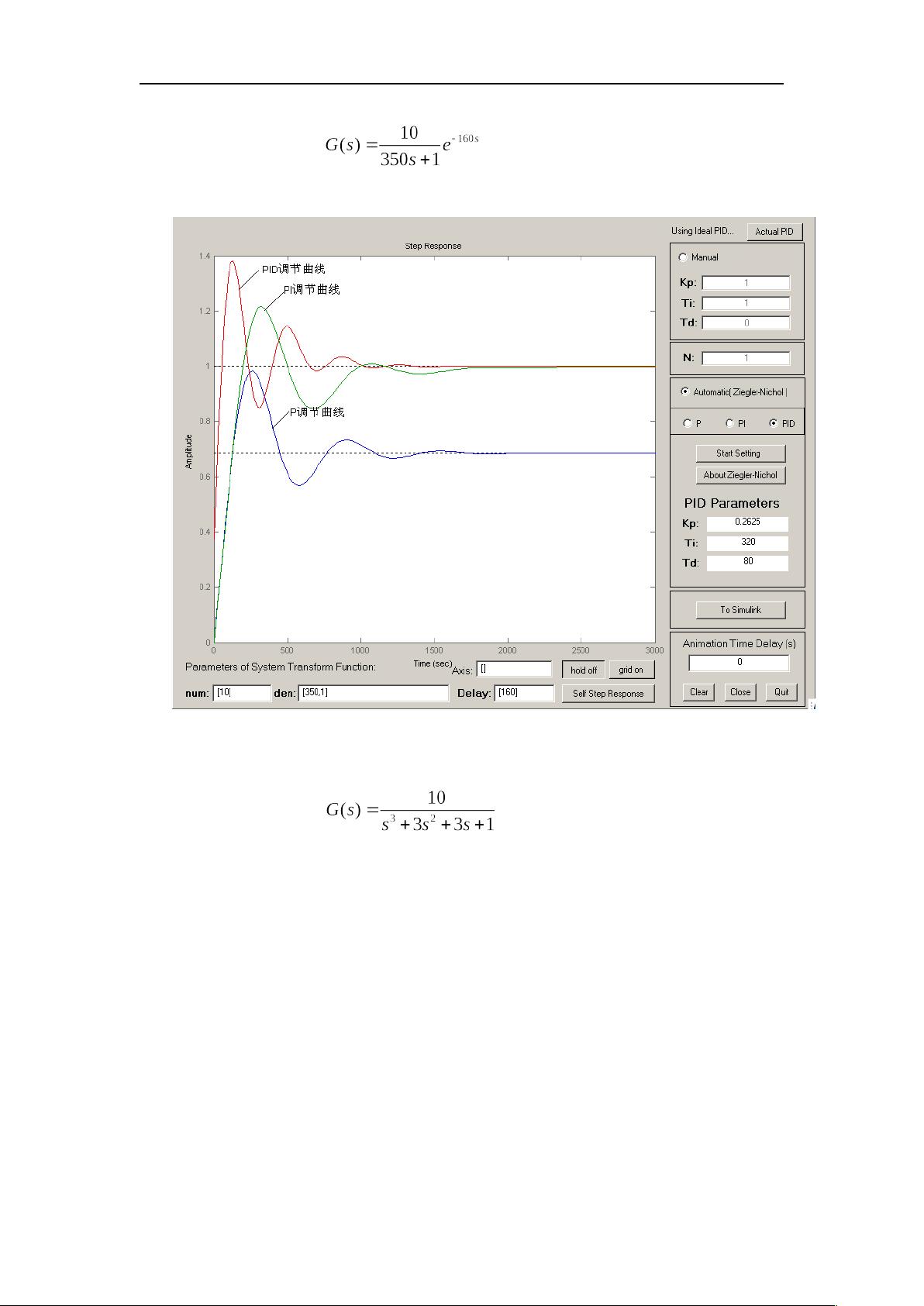
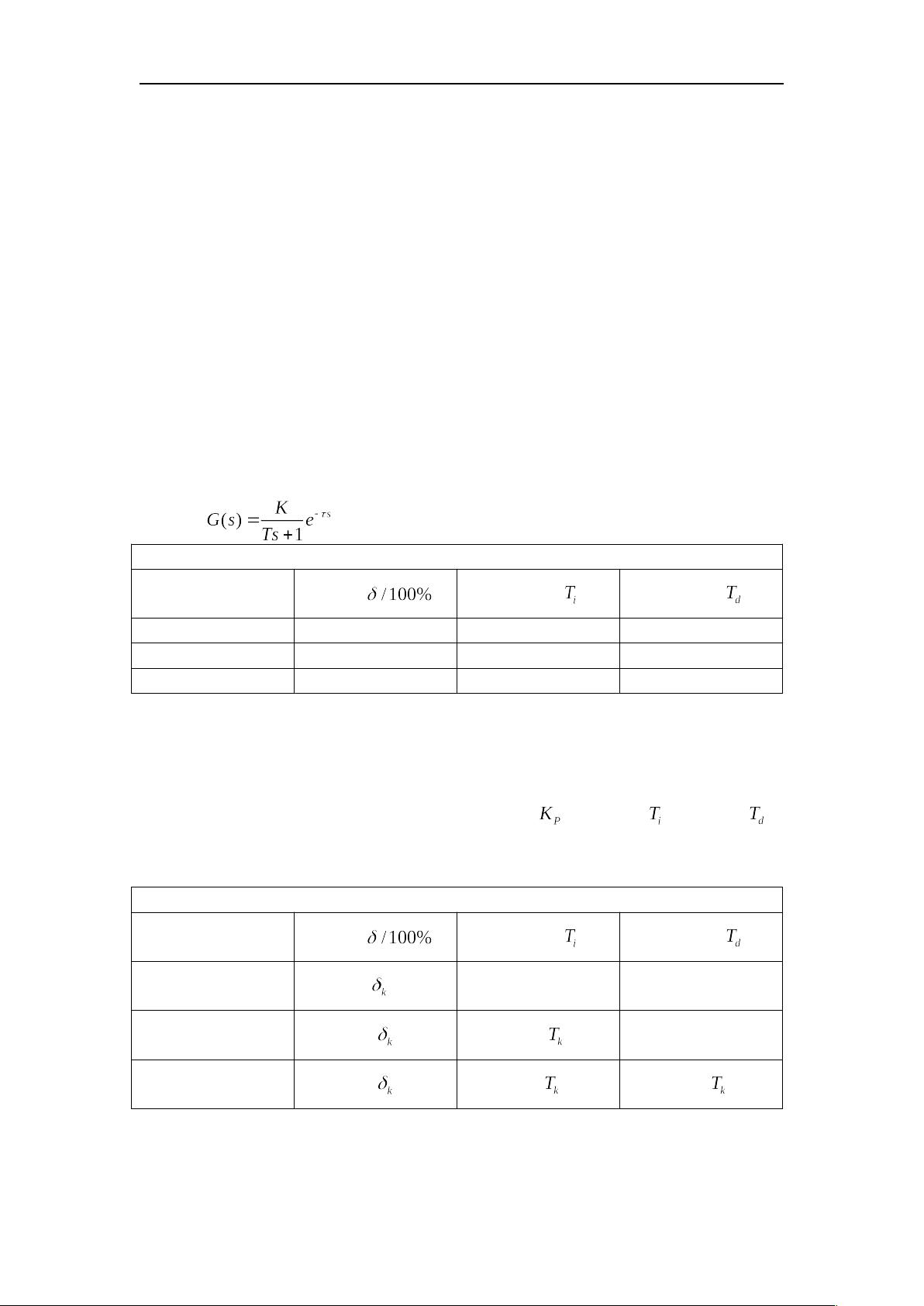
2) Ziegler-Nichol 曲线响应法就是一对象的控制通道开环阶跃响应为依据,通过经验
公式求取调节器最佳参数整定值开环整定方法。适用于对象的传递函数可近似为
的场合,知道对象的 K,T,τ 就可以由下表计算控制器的参数了。
响应曲线法整定 PID 参数
控制器类型
比例度
积分时间 微分时间
P K(τ/T)×100%
―― ――
PI 1.1K(τ/T)×100% 3.3τ
――
PID 0.85K(τ/T)×100% 2.0τ 0.5τ
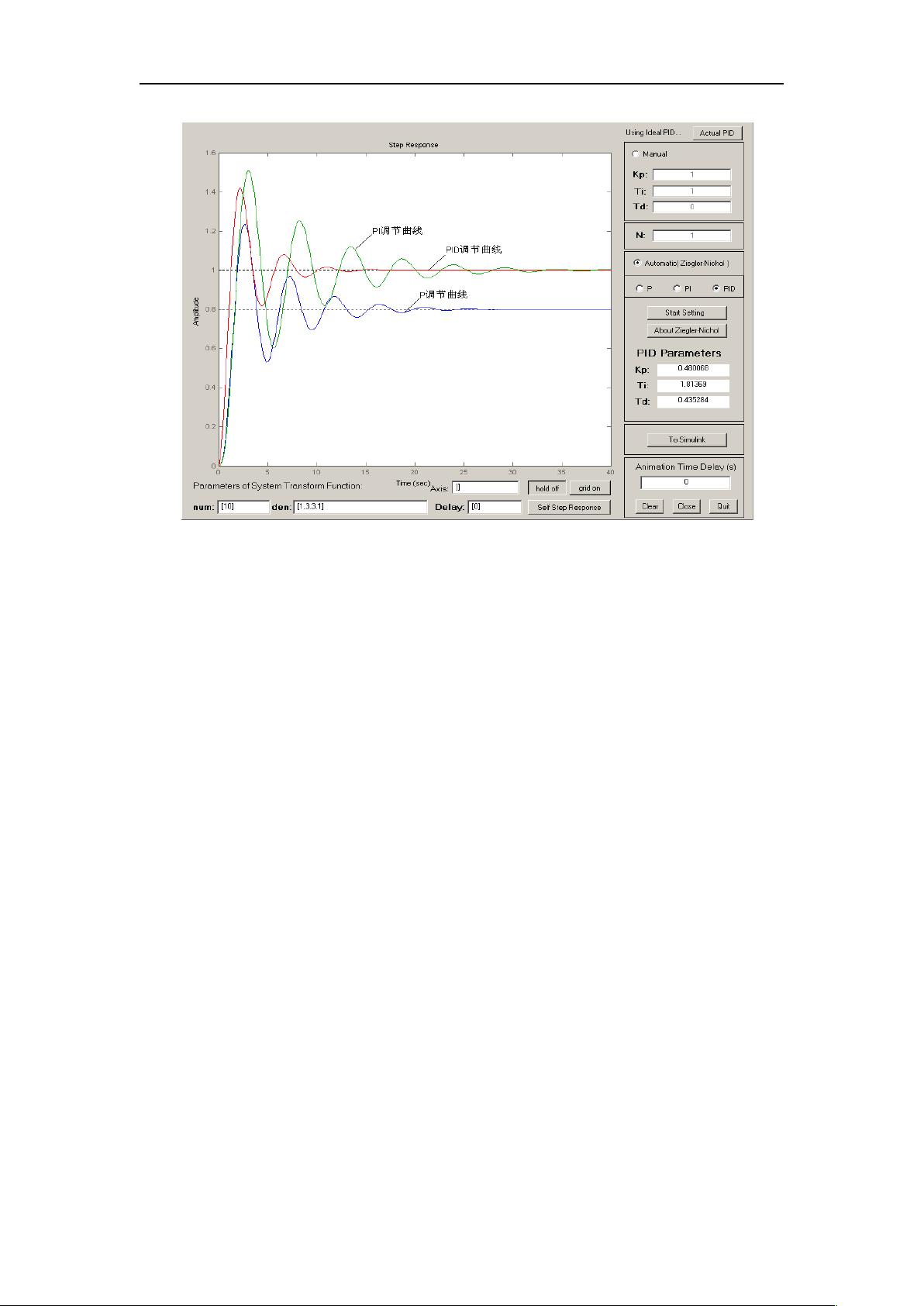
3) 临界比例度法就是先在单纯比例作用(P)下,将比例增益逐步增加(亦即将比例度逐
步减小),直到被控变量出现等幅振荡为止。此时的比例度称为临界比例度,振荡
周期称为临界周期。然后按照一定的公式,由临界比例度和临界周期计算出在采
用 P.,PI 或 PID 控制算法时应选取的比例增益 、积分时间 和微分时间 的
参数值。适用于未知对象的传递函数的场合,求出临界比例度和临界周期后,便
可由下表求出 PID 的参数整定值。
临界比例度法整定 PID 参数
控制器类型
比例度
积分时间 微分时间
P 2
―― ――
PI 2.2 0.833
――
PID 1.7 0.50 0.125
2