5.Topological simultaneous localization and mapping (SLAM) towar...
需积分: 0 4 浏览量
2010-04-07
20:29:24
上传
评论
收藏 217KB PDF 举报

IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 17, NO. 2, APRIL 2001 125
Topological Simultaneous Localization and Mapping
(SLAM): Toward Exact Localization Without
Explicit Localization
Howie Choset, Member, IEEE, and Keiji Nagatani, Member, IEEE
Abstract—One of the critical components of mapping an
unknown environment is the robot’s ability to locate itself on
a partially explored map. This becomes challenging when the
robot experiences positioning error, does not have an external
positioning device, nor the luxury of engineered landmarks
placed in its free space. This paper presents a new method for
simultaneous localization and mapping that exploits the topology
of the robot’s free space to localize the robot on a partially
constructed map. The topology of the environment is encoded in
a topological map; the particular topological map used in this
paper is the generalized Voronoi graph (GVG), which also encodes
some metric information about the robot’s environment, as well.
In this paper, we present the low-level control laws that generate
the GVG edges and nodes, thereby allowing for exploration of
an unknown space. With these prescribed control laws, the GVG
(or other topological map) can be viewed as an arbitrator for a
hybrid control system that determines when to invoke a particular
low-level controller from a set of controllers all working toward
the high-level capability of mobile robot exploration. The main
contribution, however, is using the graph structure of the GVG,
via a graph matching process, to localize the robot. Experimental
results verify the described work.
Index Terms—Exploration, localization, mapping, mobile
robots, motion planning, tologoical maps, Voronoi diagrams.
I. INTRODUCTION
S
ENSOR-BASED exploration enables a robot to explore an
unknownenvironment and build a map of that environment.
A critical component of this task is the robot’s ability to ascer-
tain its location in the partially explored map or to determine
that it has entered new territory. Naively, one can determine the
coordinates of the robot using dead-reckoning, a process
that determines the robot’s location by integrating data from
wheel encoders that count the number of wheel rotations (or
fractional rotations). Dead-reckoning fails to accurately posi-
tion the robot for many reasons, including wheel slippage. If
Manuscript received January 4, 2000; revised October 23, 2000. This paper
was recommended for publication by Associate Editor L. Kavraki and Editor
A. De Luca upon evaluation of the reviewers’ comments. This work was sup-
ported by T. McMullen at ONR under Grant 97PR06977 and H. Moraff, J. Xiao,
L. Reeker, and E. P. Glinert at NSF under Grant IRI-9702768. This paper was
presented in part at the International Conference on Robotics and Automation,
Leuven, Belgium, 1998.
H. Choset is with the Department of Mechanical Engineering and
Robotics, Carnegie Mellon University, Pittsburgh, PA 15213 USA (e-mail:
choset@cs.cmu.edu).
K. Nagatani was with the Department of Mechanical Engineering and
Robotics, Carnegie Mellon University, Pittsburgh, PA 15213 USA. He is
now with the Man–Machine System Laboratory, Department of System
Engineering, Okayama University, Okayama 700-8530, Japan.
Publisher Item Identifier S 1042-296X(01)05570-7.
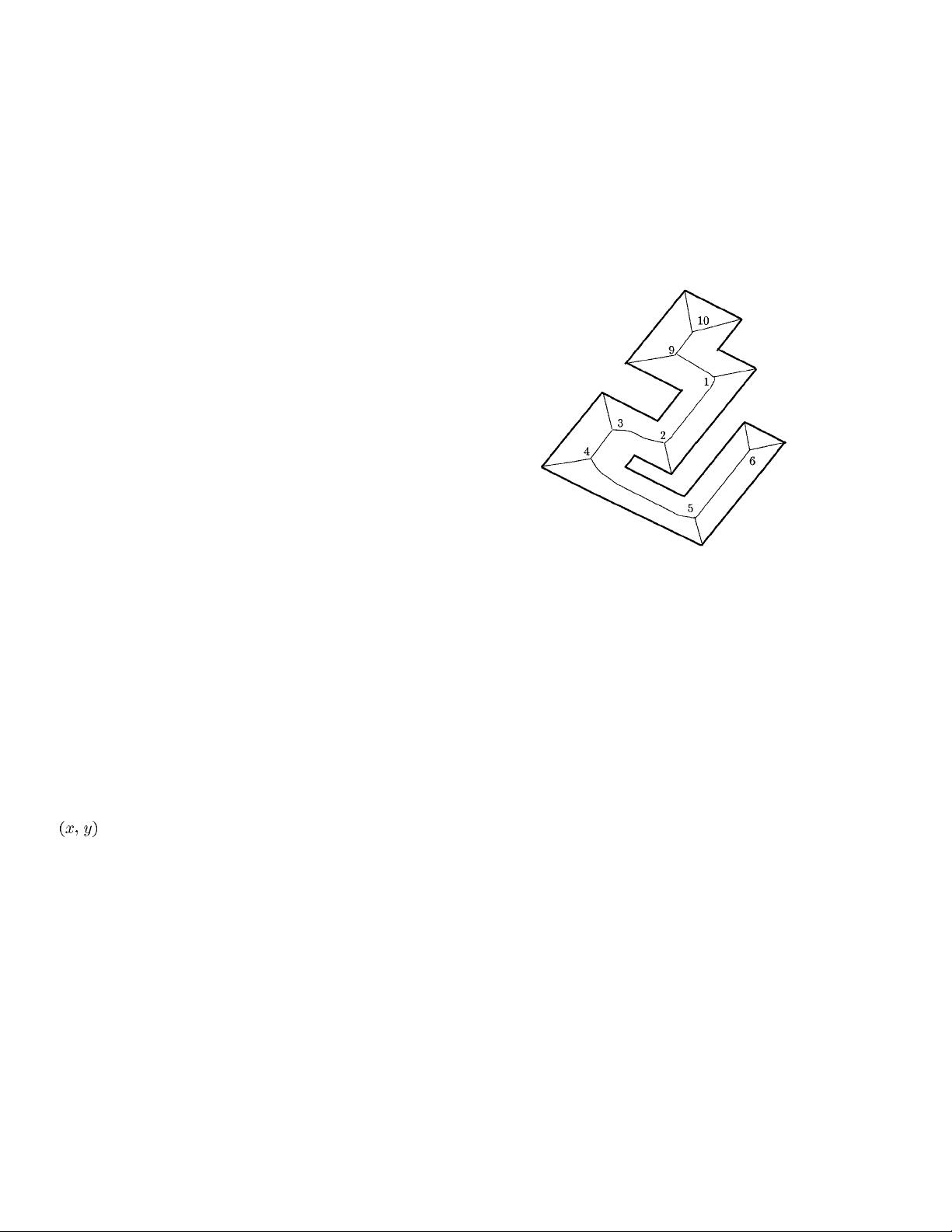
Fig. 1. The GVG where the symbols (nodes) are labeled 1–10.
the robot slips, the wheel rotation does not correspond to the
robot’s motion and thus encoder data, which reflect the state
of the wheel rotation, does not reflect the robot’s net motion,
thereby causing positioning error. A global positioning systems
(GPS) and inertial systems offer an alternative to dead-reck-
oning, but have their drawbacks as well. Finally, landmarks with
known locations can be deployed in the environment, but the
task described in this paper considers environments where their
geometry is completely unknown a priori. We do assume, how-
ever, that the unknown environment is static, planar, and that our
range sensors have sufficient range.
All robots that do not use preplaced landmarks or GPS must
employ a localization algorithm while mapping an unknown
space, hence the term simultaneous localization and mapping,
first coined by Leonard and Durrant-Whyte [16], [25]. This
paper takes a topological approach to SLAM. It is our belief
that the topological and geometric structure of free space induce
a natural hierarchy of symbols and connections among these
symbols that represent free space. At a high level, a topological
map [14] serves as an example of symbols and connections
between them. For Kuipers, the symbols are distinct places,
which are local maxima of the distance to nearby obstacles,
and the connections are the graph edges that link distinct
places. For an indoor office-like environments, junctions and
termination points of hallways represent symbols while the
hallways themselves are the connections. For the generalized
Voronoi graph (GVG) [21]; [7] (defined in Section II-A), the
Voronoi vertices (we call them meet points) are the symbols
while the edges form connections (Fig. 1).
1042–296X/01$10.00 © 2001 IEEE
剩余12页未读,继续阅读













评论0