PMSM电机无传感器FOC矢量控制

说明:下面程序取自 IFX 16 位机无传感器 PMSM 电机矢量控制程序。程序架构是 C 语言嵌套汇编。其中坐标系变换是汇编编写。有插图说明,便于
更好的理解。其中包括坐标系变换,磁链角估算,PI 速度环电流环调节。(单片机 XC2236N,Tasking 编译器 Cavin 整理)
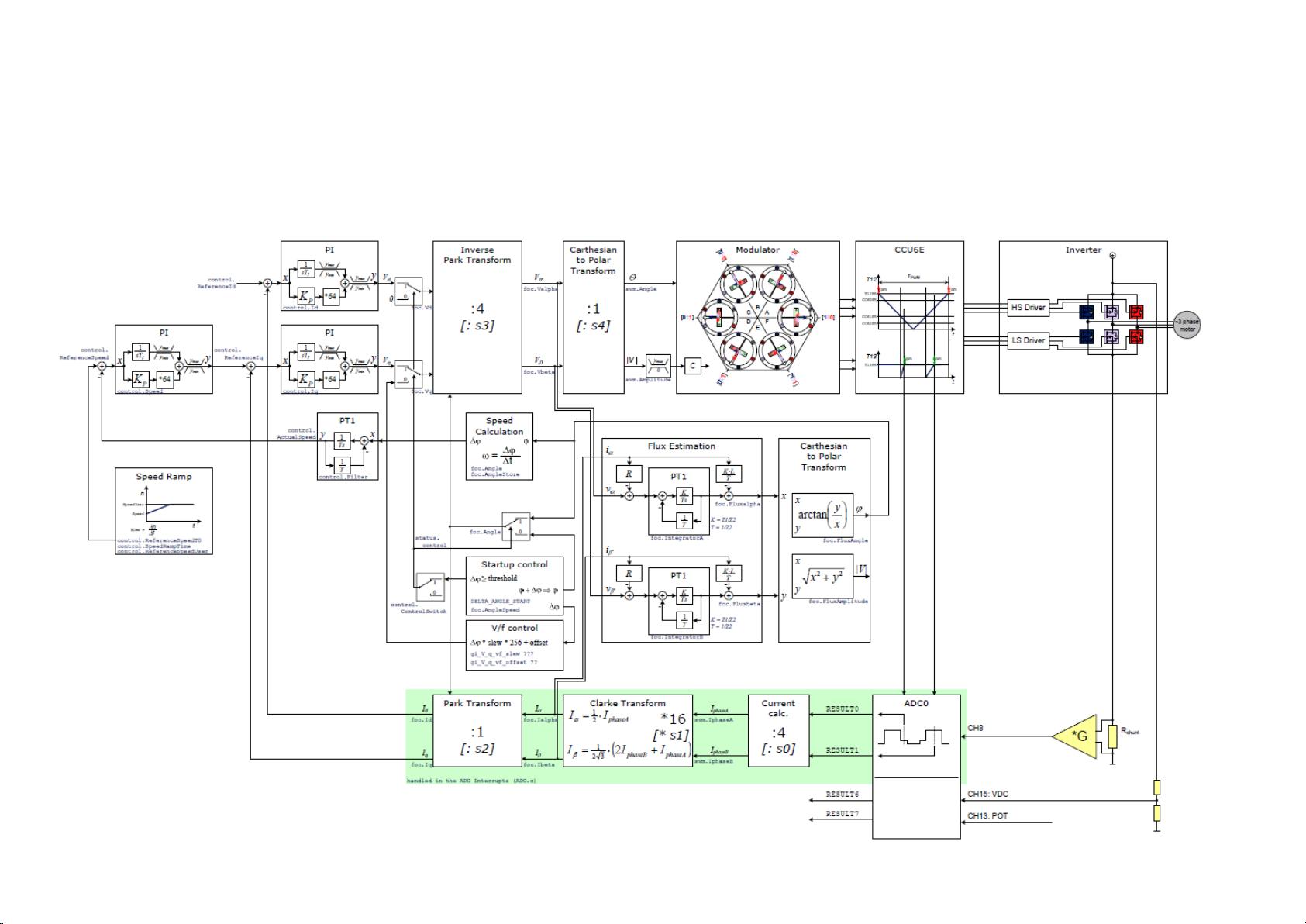
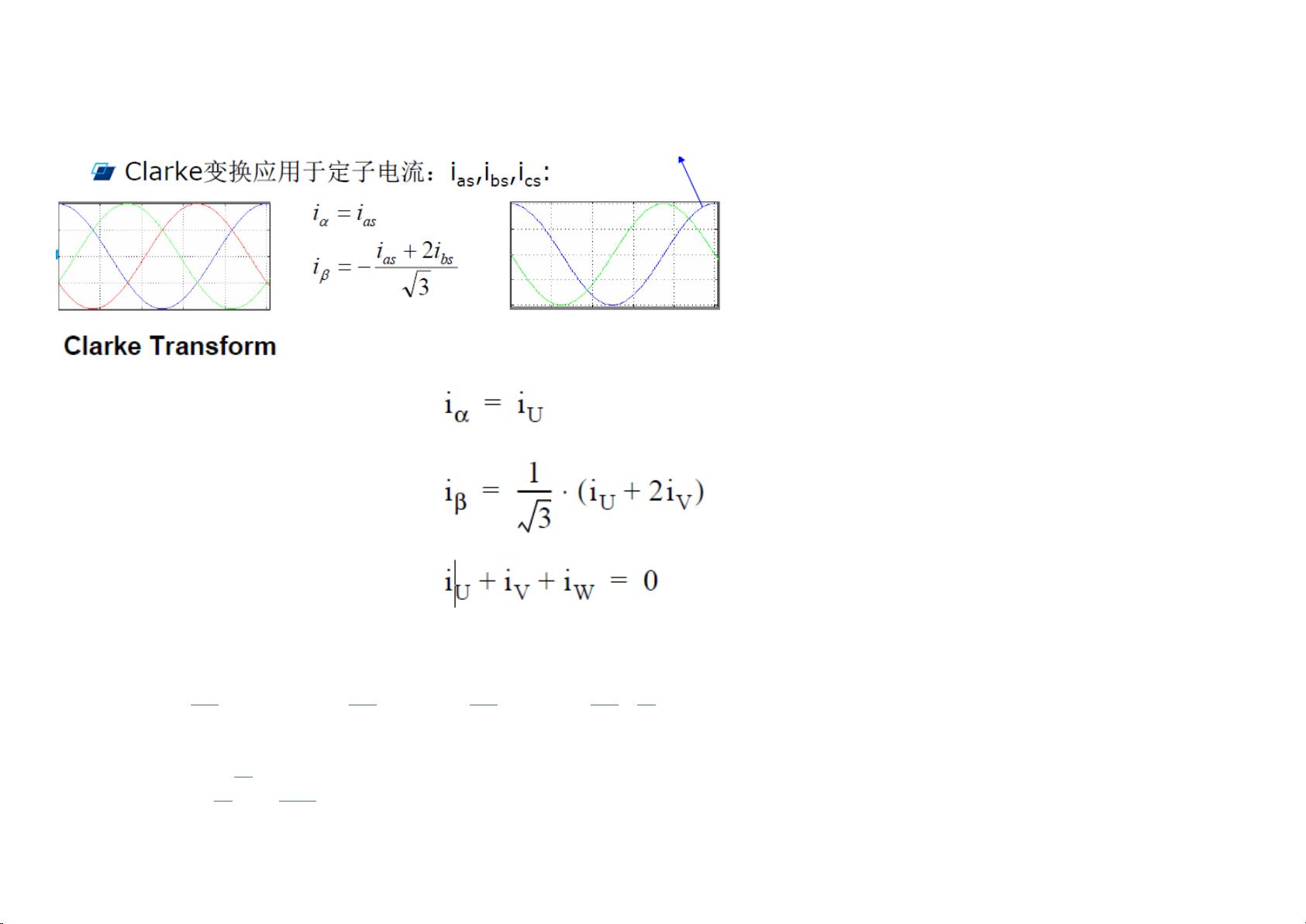
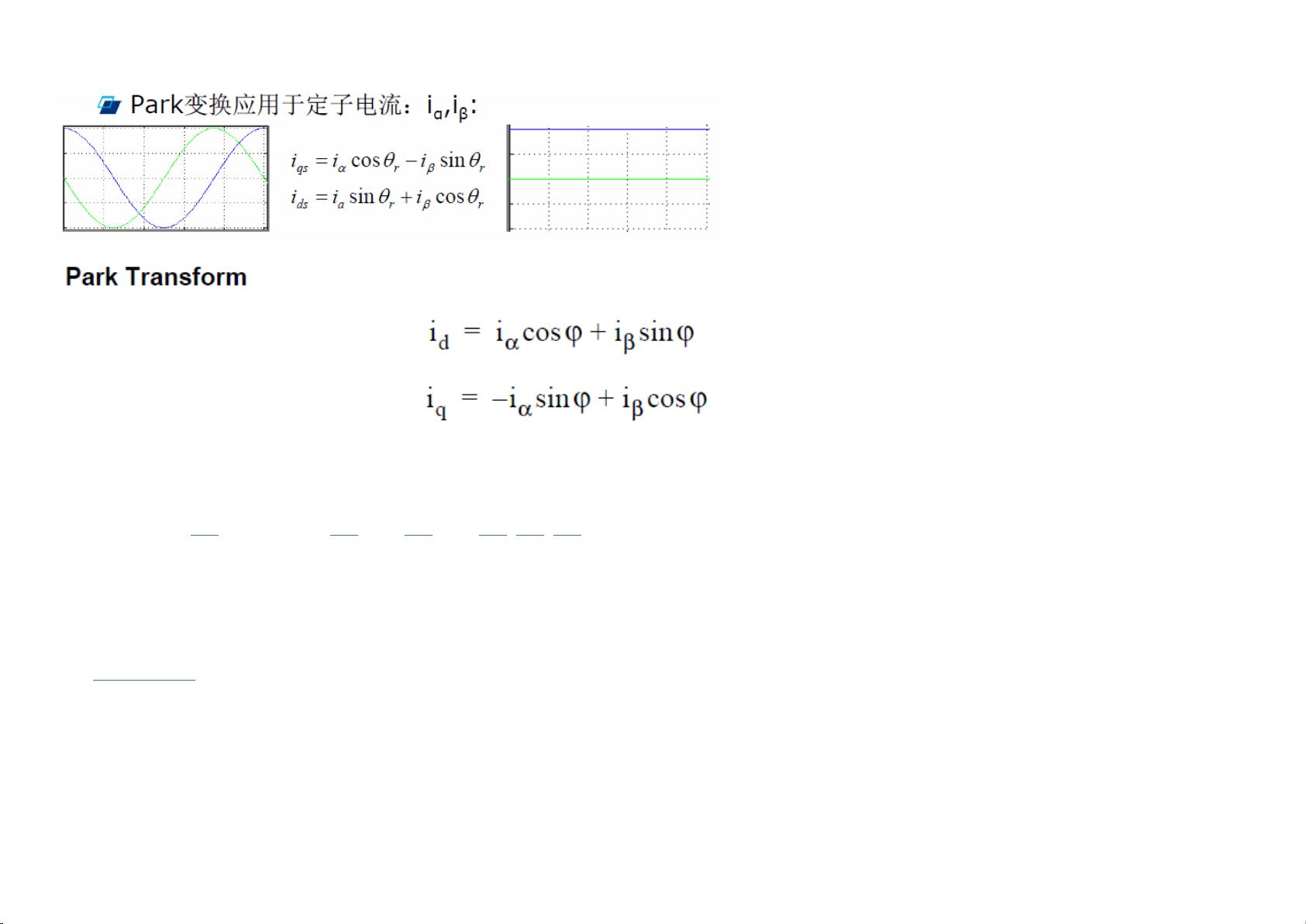
坐标系变换说明:双电阻采样得到两相电流(ia, ib),由 abc120°静止坐标系 Clarke 变换到直角坐标系(iα, iβ),由(iα, iβ)静止直角坐标系 Park 变换到直
角旋转坐标系(iq, id)。直流 id 不变,通过 PI 速度环电流环得到期望直流 iq,进行限幅控制。由旋转坐标系(vq, vd)经过 Park 逆变换到静止坐标系(vα, vβ),
然后再经过矢量调制成 PWM 控制电机。
无传感器角度估算:由 Clarke 变换得到 (iα, iβ)和由 Park 逆变换得到的(vα, vβ),经过低通滤波器 PT1,再由直角坐标系变极坐标系得到磁链估算角
无传感器开环启动策略:在定子中加入幅值及频率都受控的电流,若 PLL 收敛,切换到 FOC 闭环控制。


剩余34页未读,继续阅读
资源评论

 enorm2018-02-24不错, 值得参考
enorm2018-02-24不错, 值得参考 clq__fly2015-03-22总体不错,就是程序注释有点少
clq__fly2015-03-22总体不错,就是程序注释有点少











