
1
ENFT: Efficient Non-Consecutive Feature
Tracking for Robust Structure-from-Motion
Guofeng Zhang, Haomin Liu, Zilong Dong, Jiaya Jia, Tien-Tsin Wong, and Hujun Bao
Abstract—Structure-from-motion (SfM) largely relies on the
quality of feature tracking. In image sequences, if disjointed
tracks caused by objects moving in and out of the view,
occasional occlusion, or image noise, are not handled well,
the corresponding SfM could be significantly affected. This
problem becomes more serious for accurate SfM of large-scale
scenes, which typically requires to capture multiple sequences
to cover the whole scene. In this paper, we propose an efficient
non-consecutive feature tracking (ENFT) framework to match
the interrupted tracks distributed in different subsequences
or even in different videos. Our framework consists of steps of
solving the feature ‘dropout’ problem when indistinctive struc-
tures, noise or even large image distortion exist, and of rapidly
recognizing and joining common features located in different
subsequences. In addition, we contribute an effective segment-
based coarse-to-fine SfM estimation algorithm for efficiently
and robustly handling large datasets. Experimental results on
several challenging and large video datasets demonstrate the
effectiveness of the proposed system.
Index Terms—Non-Consecutive Feature Tracking, Track
Matching, Structure-from-Motion, Bundle Adjustment.
I. INTRODUCTION
Large-scale 3D reconstruction [34], [23], [14], [13], [8]
finds many practical applications in, for example, Google
Earth and Microsoft Virtual Earth. Recent work primarily
relies on the SfM algorithms [16], [52], [2], [1], [48]
to automatically estimate 3D features given the input of
images or video collections.
Compared to images, videos contain denser geometrical
and structural information, and are the main source of SfM
in the movie and commercial industry. A common strategy
for video SfM estimation is by employing feature point
tracking [27], [38], [26], which takes care of the temporal
relationship among frames. It is also a basic tool for solving
a variety of computer vision problems, such as camera
tracking, video matching, and object recognition.
In this paper, we discuss two critical problems for
feature point tracking, which could seriously handicap SfM
especially for large-scale scene modeling. We propose new
methods to address them. One problem is the vulnerabil-
ity of feature tracking to object occlusions, illumination
change, noise, and large motion, which easily causes occa-
sional feature drop-out and distraction. This problem makes
robust feature tracking from long sequences challenging.
G. Zhang, H. Liu, Z. Dong and H. Bao are with the State Key
Lab of CAD&CG, Zhejiang University. G. Zhang is also affiliated with
Innovation Joint Research Center for Cyber-Physical-Society System, Zhe-
jiang University. Email: {zhangguofeng, zldong, bao}@cad.zju.edu.cn,
172753015@qq.com.
J. Jia and T.-T. Wong are with The Chinese University of Hong Kong.
Email: {leojia,ttwong}@cse.cuhk.edu.hk
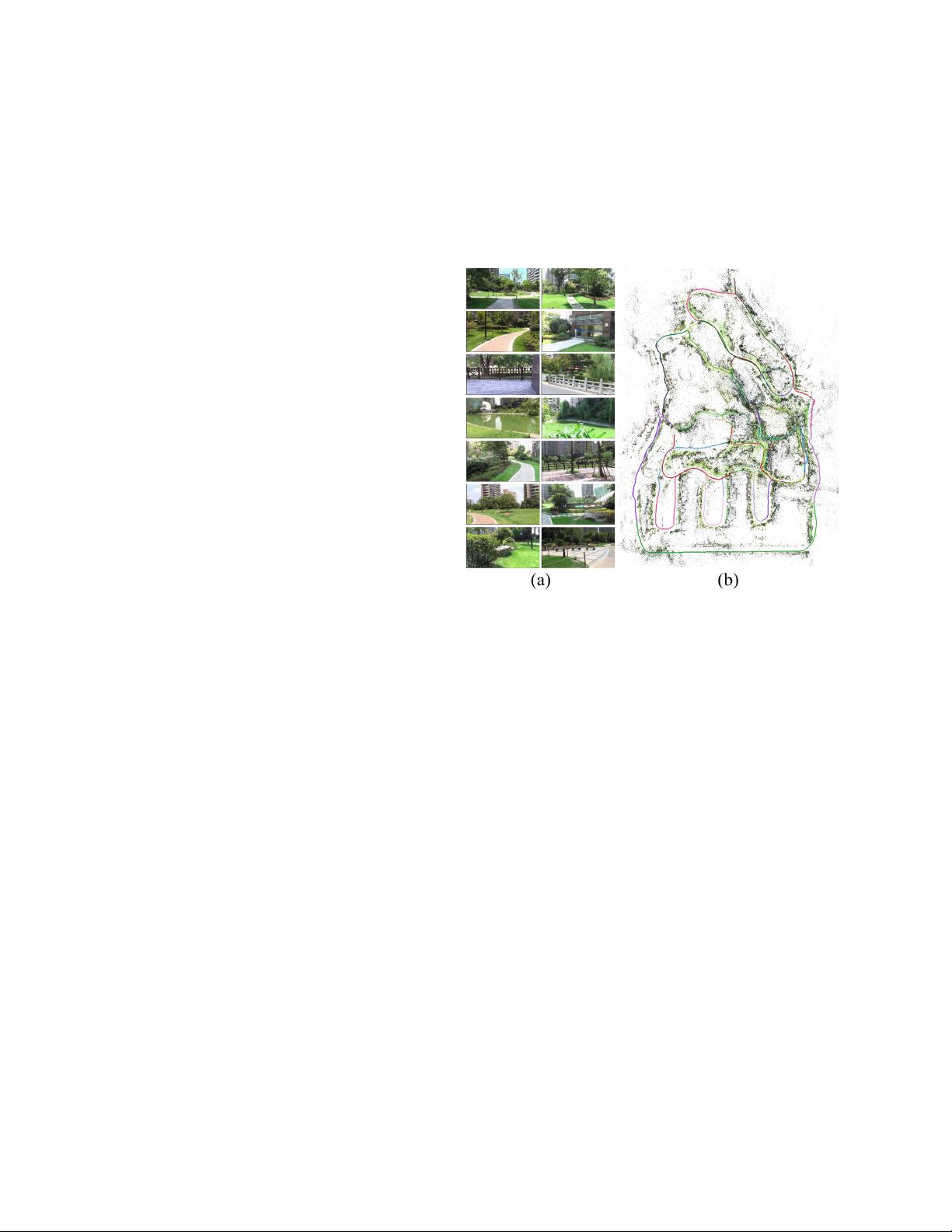
Fig. 1. A large-scale “Garden” example. (a) Snapshots of the input
videos. (b) With the matched feature tracks, we register 3D points and
camera trajectories in a large-scale unified 3D system. Camera trajectories
are differently color-coded.
The other problem is the inability of sequential fea-
ture tracking to cope with feature matching over non-
consecutive subsequences. A typical scenario is that the
tracked object moves out and then re-enters the field-
of-view, which yields two discontinuous subsequences
containing the same object. Although there are com-
mon features in the two subsequences, they cannot be
matched/included in a single track using conventional track-
ing methods. Addressing this issue can alleviate the drift
problem of SfM, which in turn benefits high-quality 3D re-
construction as demonstrated in our experimental results. A
na
¨
ıve solution is to exhaustively search all features, which
could consume much computation since many temporally
far away frames simply share no content.
We propose an efficient non-consecutive feature tracking
(ENFT) framework which can effectively address the above
problems in two phases – that is, consecutive point track-
ing and non-consecutive track matching. We demonstrate
their significance for SfM using a few challenging videos.
Consecutive point tracking detects and matches invariant
features in consecutive frames. A new matching strategy
is proposed to greatly increase the matching rate and
extend lifetime of the tracks. Then in non-consecutive
track matching, by rapidly computing a match matrix, a
set of disjoint subsequences with overlapping content can
arXiv:1510.08012v1 [cs.CV] 27 Oct 2015
剩余12页未读,继续阅读
资源评论


zx2012zx2011
- 粉丝: 0
- 资源: 1









最新资源
- YOLO算法-禾本科杂草数据集-4760张图像带标签.zip
- YOLO算法-无人机俯视视角动物数据集-10140张图像带标签-斑马-骆驼-大象-牛-羊.zip
- YOLO算法-挖掘机与火焰数据集-8129张图像带标签-挖掘机.zip
- YOLO算法-塑料数据集-3029张图像带标签-塑料制品-白色塑料.zip
- PyKDL库源码,编译安装PyKDL库
- YOLO算法-红外探测数据集-10573张图像带标签-小型车-人-无人机.zip
- 基于 C++和TCP和WebSocket的即时通信系统设计与实现(源码+文档)
- 电商管理系统项目源代码全套技术资料.zip
- 全国2022年04月高等教育自学考试02326操作系统试题及答案
- YOLO算法-垃圾数据集-3818张图像带标签-可口可乐-百事可乐.zip
- YOLO算法-瓶纸盒合并数据集-1317张图像带标签-纸张-纸箱-瓶子.zip
- YOLO算法-杂草检测项目数据集-3970张图像带标签-杂草.zip
- YOLO算法-杂草检测项目数据集-3853张图像带标签-杂草.zip
- YOLO算法-挖掘机与火焰数据集-7735张图像带标签-挖掘机.zip
- 文旅项目源代码全套技术资料.zip
- YOLO算法-罐头和瓶子数据集-1531张图像带标签-鲜奶-瓶子.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


