
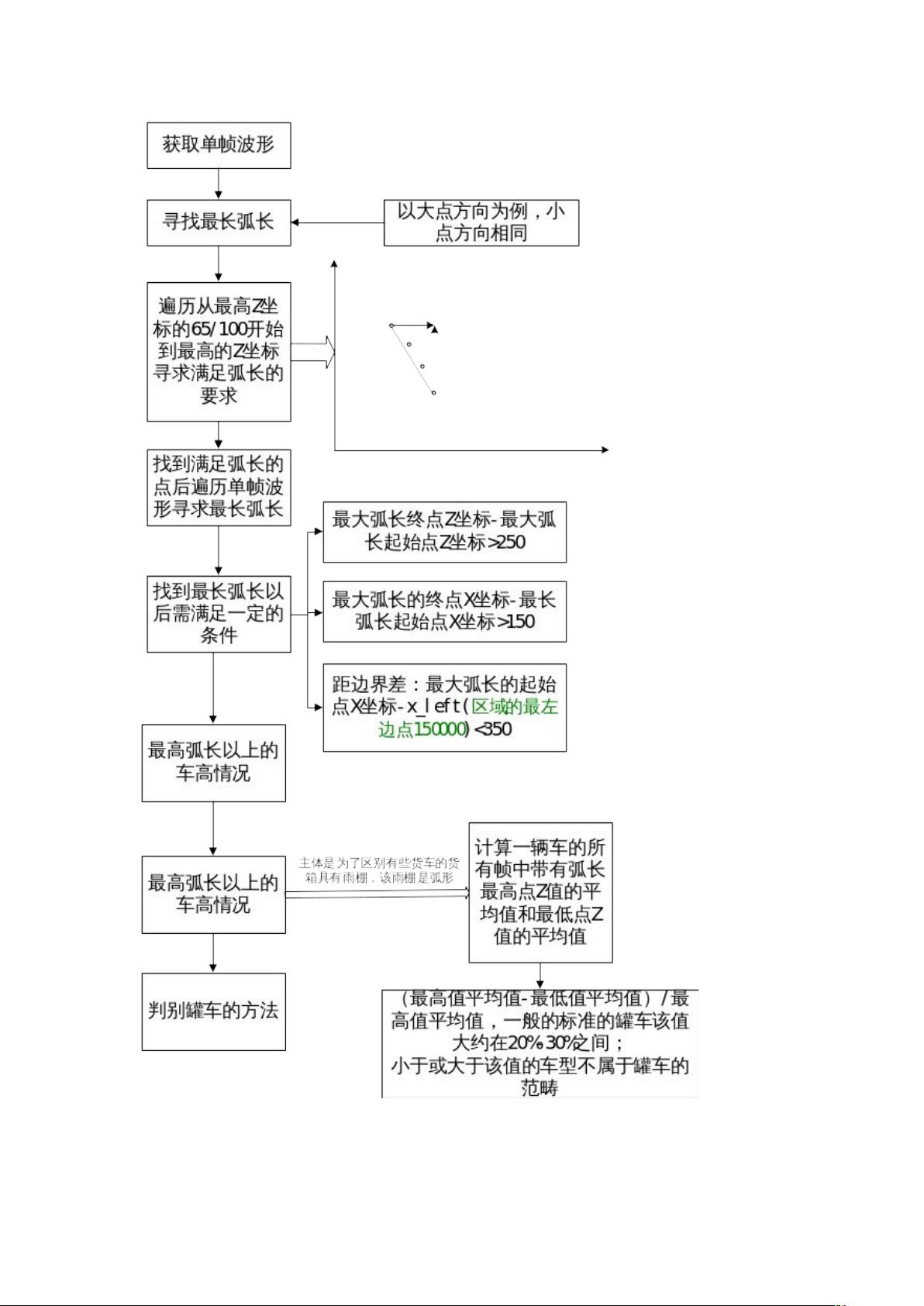
油罐车车型识别算法分析
目前经过测试的站点,准确率和识别率统计
修改后初步比对
上周五汇报程序:平均准确率 ,平均识别率
上次汇报程序:平均准确率 ,平均识别率
源程序:平均准确率 ,平均识别率
最新版程序:实际罐体 测试正确的罐体
测试出的罐体 个
识别率 准确率
下沙中存在 台罐车属于 、 车道,车身本身被遮挡三分之一以上,几乎无法识别
唐山 袁浦
三墩
(三、
四车
道)
下沙 曙光
平均识别率 平均准确率
实际罐体
123 20 30 115 45
测试正确
109 17 26 90 35
测试总罐体
125.00
%
20 32 122 39
识别率
88.61% 85% 86.66% 78.26% 77.77% 83.26%
准确率
87.20% 85% 81.32% 73.77% 89% 83.25%
原程序
实际罐体
115
(缺
搅拌车)
20 118 44
测试正确
102 14 42 4
测试总罐体
126 14 45 4
识别率
88.69% 70% 58.23% 35.59% 9.09% 43%
准确率
80.95% 100% 97.87% 93.33% 100.00% 97%
78%
(上
次汇报)
77.61%
(上次汇
报)

剩余17页未读,继续阅读
资源评论



zmd13397149090
- 粉丝: 2
- 资源: 21









最新资源
- F1:帮助/help F2:切换相对/坐标值 F3: 显示全部 F4:参考点“自From” F5:切换当前坐标 F6:导航/栅格/智能 F7: 三视图导航开关/guide F8:正交/ortho F9
- 基于Cisco Packet Tracer 6.2的校园网仿真实验.pkt
- A051-基于Spring Boot的网络海鲜市场系统的设计与实现
- 使用WindowsAPI写的一些渗透小工具.zip
- 不要过审 ,不要过审 ,不要过审
- 神经网络的概要介绍与分析
- C#实现下拉列表显示datagridview
- A049-基于Java的实习管理系统的设计与实现
- A048-基于SpringBoot的在线考试系统的设计与实现
- 搜索引擎的概要介绍与分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


