基于TQ2440开发板uboot移植


u‐boot 移植详细文档
作者:TekkamanNinja
作者博客:http://tekkman.cublog.cn
整理:CoolborXie
一、BootLoader 的概念和功能
1、嵌入式 Linux 软件结构与分布
在一般情况下嵌入式 Linux 系统中的软件主要分为以下及部分:
(1)引导加载程序:其中包括内部 ROM 中的固化启动代码和 BootLoader 两部分。
而这个内部固化 ROM 是厂家在芯片生产时候固化的,作用基本上是引导 Boot Loader。有的芯片比较复
杂,比如 Omap3,他在 flash 中没有代码的时候有许多启动方式:USB、UART 或以太网等等。而 S3C24x0 则很
简单,只有 Norboot 和 Nandboot。
(2)Linuxkernel 和 drivers。
(3)文件系统。包括根文件系统和建立于 Flash 内存设备之上的文件系统(EXT4、UBI、CRAMFS 等等)。
它是提供管理系统的各种配置文件以及系统执行用户应用程序的良好运行环境的载体。
(4)应用程序。用户自定义的应用程序,存放于文件系统之中。
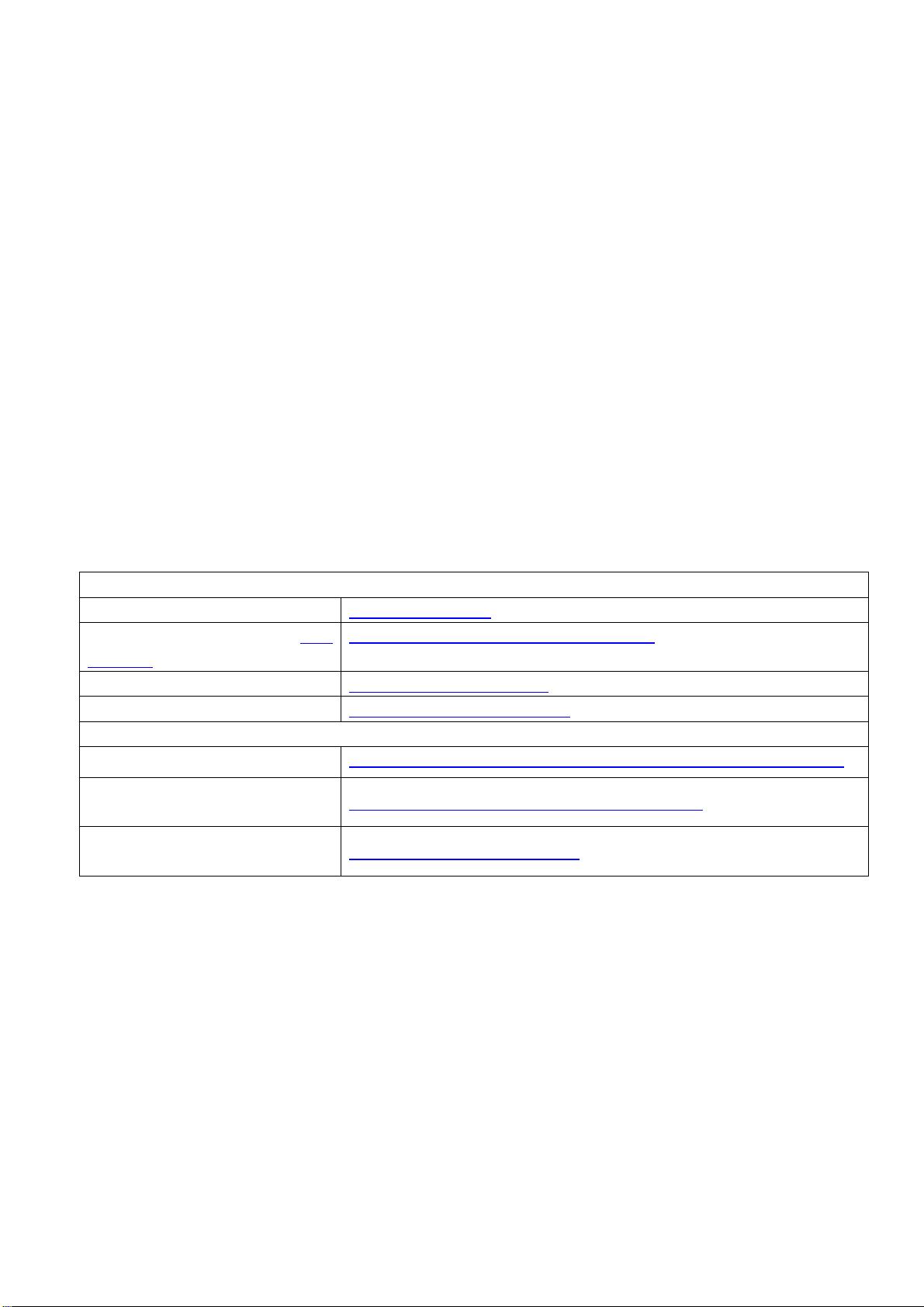
在 Flash 存储器中,他们的一般分布如下:
但是以上只是大部分情况下的分布,也有一些可能根文件系统是 initramfs,被一起压缩到了内核映像里,
或者没有 Bootloader 参数区,等等。
2、在嵌入式 Linux 中为什么要有 BootLoader
在 linux 内核的启动运行除了内核映像必须在主存的适当位置,CPU
还必须具备一定的条件:
1. CPU 寄存器的设置:
R0=0;
R1=MachineID
(即 MachineTypeNumber,定义在 linux/arch/arm/tools/mach‐types);
R2=内核启动参数在 RAM 中起始基地址;
2. CPU 模式:
必须禁止中断(IRQs 和 FIQs);
CPU 必须 SVC 模式;
3. Cache 和 MMU 的设置:
MMU 必须关闭;
指令 Cache 可以打开也可以关闭;
数据 Cache 必须关闭;
但是在 CPU 刚上电启动的时候,一般连内存控制器都没有配置过,根本无法在内存中运行程序,更不可
能处在 Linux 内核的启动环境中。为了初始化 CPU 及其他外设,使得 Linux 内核可以在系统主存中跑起来,并
让系统符合 Linux 内核启动的必备条件,必须要有一个先于内核运行的程序,他就是所谓的引导加载程序(Boot
Loader)。
而 Boot Loader 并不是 Linux 才需要,是几乎所有的运行操作系统的设备都具备的。我们的 PC 的 BOIS 就
是 BootLoader 的一部分(只是前期引导,后面一般还有外存中的各种 BootLoader),对 于 LinuxPC 来说,Boot
Loader=BIOS+GRUB/LILO。
3、BootLoader 的功能和选择

剩余47页未读,继续阅读
资源评论

 mission0082013-06-28不错 还可以 对我帮助很大
mission0082013-06-28不错 还可以 对我帮助很大












