





J R KERR
AUTOMATION
ENGINEERING • www.jrkerr.com
1
PIC-SERVO CNC: 3-Axis Milling Machine Controller
and G-Code Interpreter
for PIC-SERVO CMC Motion Controllers
CAUTION
This program is provided by J.R. Kerr Automation Engineering as an example only, intended for
users designing similar systems. It is not intended as a failsafe product for general use, and as
such, it should be used for evaluation purposes only and only with the utmost of caution. It is not
supported by J.R. Kerr Automation Engineering, and we make no warranties whatsoever
regarding its operation. The user of this software shall not use it in any situation which could
cause property damage, injury or loss of life, and the user shall take sole responsibility for any
liabilities resulting from its use.
1.0 Overview
PIC-SERVO CNC (PSCNC) is a complete example program for operating a 3-axis milling machine.
It runs under Windows 95/98/NT/2000 and interfaces to three PIC-SERVO CMC (coordinated
motion control) servo motor controllers. It includes the following features:
• Digital position readout panel displays positions in program or raw machine coordinates
• Controls for setting the origin of the program coordinate system
• Servo disable controls allows the use of hand cranks while still displaying the position
• Manual jogging controls
• G-Code Display window and immediate single-line G-Code execution
• Dynamic feed rate override, rapid speed override
• Continuous contouring of tangent and near tangent tool path segments
• Tool length compensation
The G-Code interpreter only implements a basic set G-Codes and M-Codes, but should be
sufficient in-depth evaluation purposes. The source code is provided for Borland C++ Builder as
an example, and may be modified as needed.
2.0 Setting Up for Use With Your Machine
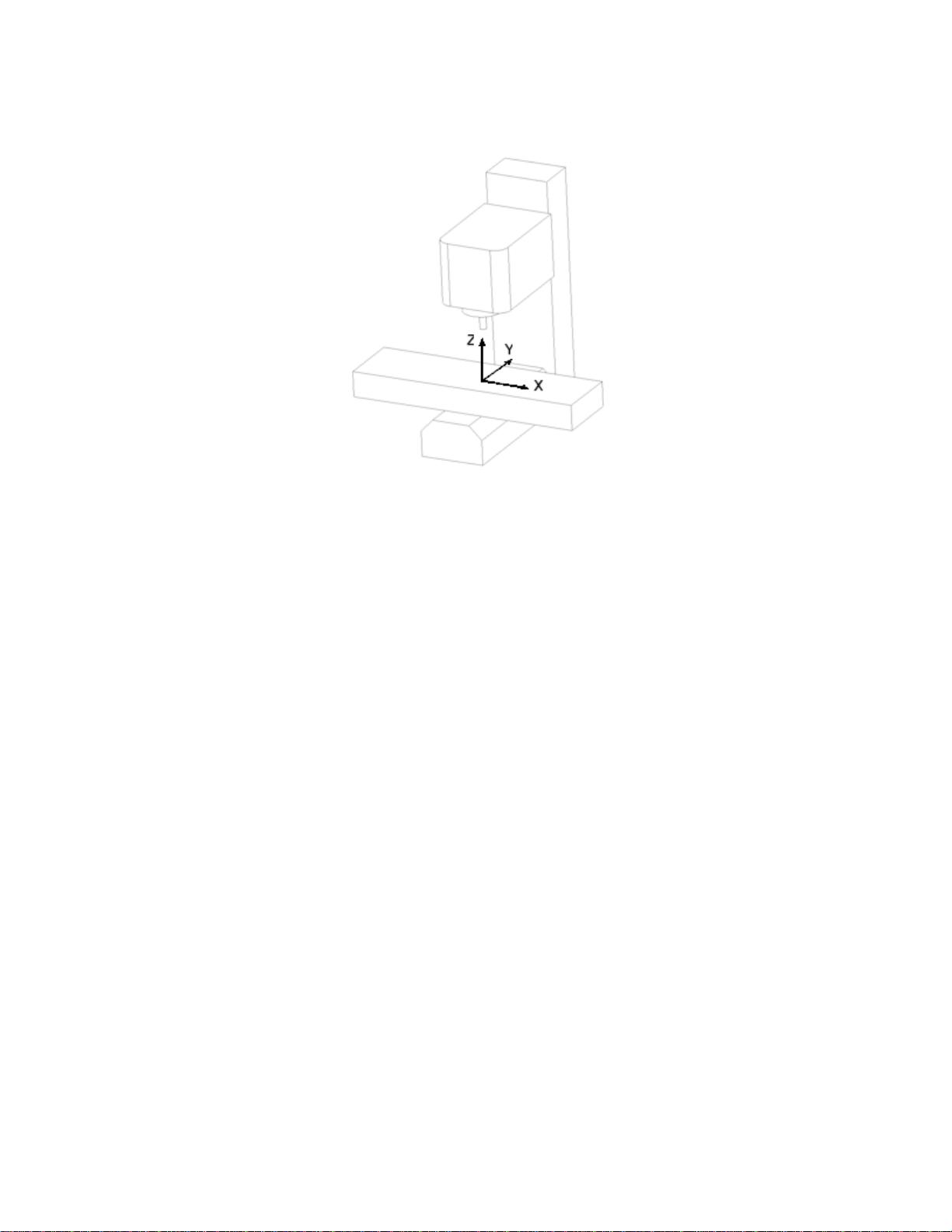
2.1 Coordinate Systems
The coordinate system used by PSCNC is shown in Figure 1 below. The orientation of this
coordinate system is fixed, but the program origin may be reset by the user. The origin for the
machine coordinate system corresponds to the position of the tool tip (using a zero length tool)
when the machine is located at its positive limit stops.
All motion in the X, Y or Z directions refers to the motion of the tool tip relative to the
coordinate system fixed in the table, even though it is the table that may be actually moving. For















- 1
- 2
- 3
- 4
前往页