
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 13, NO. 10, OCTOBER 2004 1327
Fast and Robust Multiframe Super Resolution
Sina Farsiu, M. Dirk Robinson, Student Member, IEEE, Michael Elad, and Peyman Milanfar, Senior Member, IEEE
Abstract—Super-resolution reconstruction produces one or a set
of high-resolution images from a set of low-resolution images. In
the last two decades, a variety of super-resolution methods have
been proposed. These methods are usually very sensitive to their
assumed model of data and noise, which limits their utility. This
paper reviews some of these methods and addresses their short-
comings. We propose an alternate approach using
1
norm min-
imization and robust regularization based on a bilateral prior to
deal with different data and noise models. This computationally in-
expensive method is robust to errors in motion and blur estimation
and results in images with sharp edges. Simulation results confirm
the effectiveness of our method and demonstrate its superiority to
other super-resolution methods.
Index Terms—Bilateral filter, deblurring, enhancement, image
restoration, multiframe, regularization, robust estimation, super
resolution, total variation (TV).
I. INTRODUCTION
T
HEORETICAL and practical limitations usually constrain
the achievable resolution of any imaging device. A dy-
namic scene with continuous intensity distribution
is
seen to be warped at the camera lens because of the relative mo-
tion between the scene and camera. The images are blurred both
by atmospheric turbulence and camera lens by continuous point
spread functions
and . Then, they will
be discretized at the CCD resulting in a digitized noisy frame
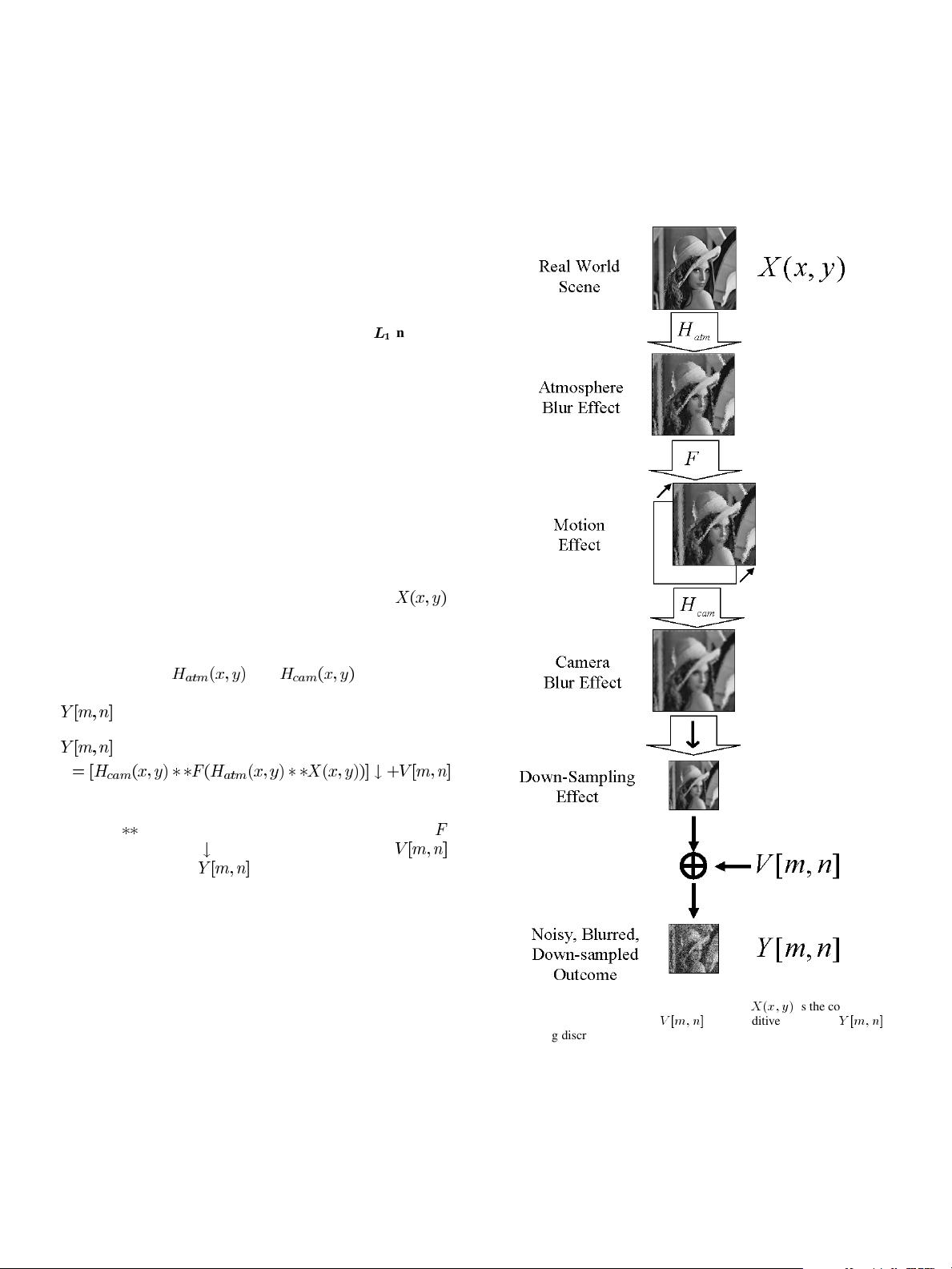
. We represent this forward model by the following:
(1)
in which
is the two-dimensional convolution operator, is
the warping operator,
is the discretizing operator, is
the system noise, and
is the resulting discrete noisy and
blurred image. Fig. 1 illustrates this equation.
Super resolution is the process of combining a sequence of
low-resolution (LR) noisy blurred images to produce a higher
resolution image or sequence. The multiframe super-resolution
Manuscript received July 21, 2003; revised January 13, 2004. This work
was supported in part by the National Science Foundation under Grant
CCR-9984246, in part by the U.S. Air Force under Grant F49620–03-1-0387,
and in part by the National Science Foundation Science and Technology Center
for Adaptive Optics, managed by the University of California, Santa Cruz,
under Cooperative Agreement AST-9876783. The associate editor coordinating
the review of this manuscript and approving it for publication was Prof. Robert
D. Nowak.
S. Farsiu, M. D. Robinson, and P. Milanfar are with the Electrical Engi-
neering Department, University of California, Santa Cruz, CA 95064 USA
(e-mail: farsiu@ee.ucsc.edu; dirkr@ee.ucsc.edu; milanfar@ee.ucsc.edu).
M. Elad is with the Computer Science Department, The Technion–Israel In-
stitute of Technology, Haifa, Israel (e-mail: elad@cs.technion.ac.il).
Digital Object Identifier 10.1109/TIP.2004.834669
Fig. 1. Block diagram representation of (1), where
X
(
x; y
)
is the continuous
intensity distribution of the scene,
V
[
m; n
]
is the additive noise, and
Y
[
m; n
]
is the resulting discrete low-quality image.
problem was first addressed in [1], where they proposed a fre-
quency domain approach, extended by others, such as [2]. Al-
though the frequency domain methods are intuitively simple and
computationally cheap, they are extremely sensitive to model er-
rors [3], limiting their use. Also, by definition, only pure trans-
lational motion can be treated with such tools and even small
1057-7149/04$20.00 © 2004 IEEE
剩余17页未读,继续阅读
资源评论


zhaoxunjie
- 粉丝: 0
- 资源: 9









最新资源
- httpsappfbql.txt
- Unit 4 Study Abroad.pptx
- Autosar学习视频10-19节
- stm32小车.zip
- AshampooUnInstaller v15.00.22 Portable一款强大的卸载工具,彻底、智能著称阿香婆强制卸载软件.rar
- Ashampoo WinOptimizer v27.00.05 阿香婆一款专业的垃圾清理、碎片整理启动项管理系统优化工具.rar
- misc设备驱动 正点原子阿尔法
- youleng-wms JAVA开发的WMS源码可以借签学习 数据库MYSQL
- 385大神asp.net三层设计停车场管理系统毕业课程源码设计+参考论文
- 数据集,训练数据集,深度学习
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


