A data-driven multi-scale extended Kalman filtering based parameter
and state estimation approach of lithium-ion polymer battery in electric
vehicles
Rui Xiong
a,b,
⇑
, Fengchun Sun
a
, Zheng Chen
b
, Hongwen He
a
a
National Engineering Laboratory for Electric Vehicles, School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China
b
DOE GATE Center for Electric Drive Transportation, Department of Electrical and Computer Engineering, University of Michigan, Dearborn, MI 48128, USA
highlights
A data-driven multi-scale extended Kalman filtering is developed for battery system.
A lumped parameter battery model against different aging levels has been proposed.
The proposed approach has less computation efficiency but higher estimation accuracy.
The proposed approach can estimate battery parameter, capacity and SoC concurrently.
The robustness of the proposed approach against different aging levels is evaluated.
article info
Article history:
Received 28 April 2013
Received in revised form 19 July 2013
Accepted 27 July 2013
Available online 23 August 2013
Keywords:
Electric
vehicles
Lithium-ion polymer
battery
Data-driven
State-of-Charge
Battery capacity
Multi-scale
abstract
Accurate estimations of battery parameter and state play an important role in promoting the commer-
cialization of electric vehicles. This paper tries to make three contributions to the existing literatures
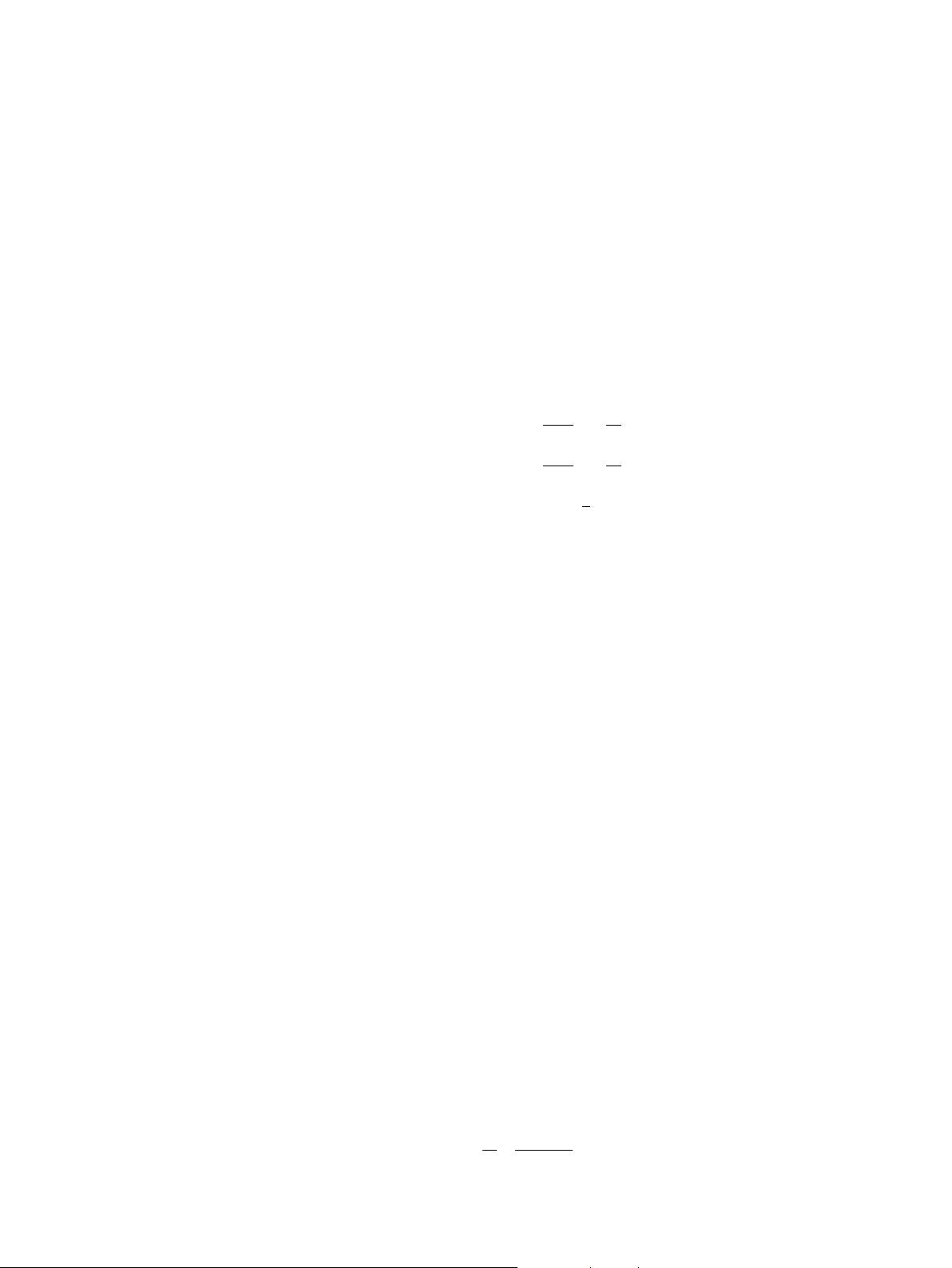
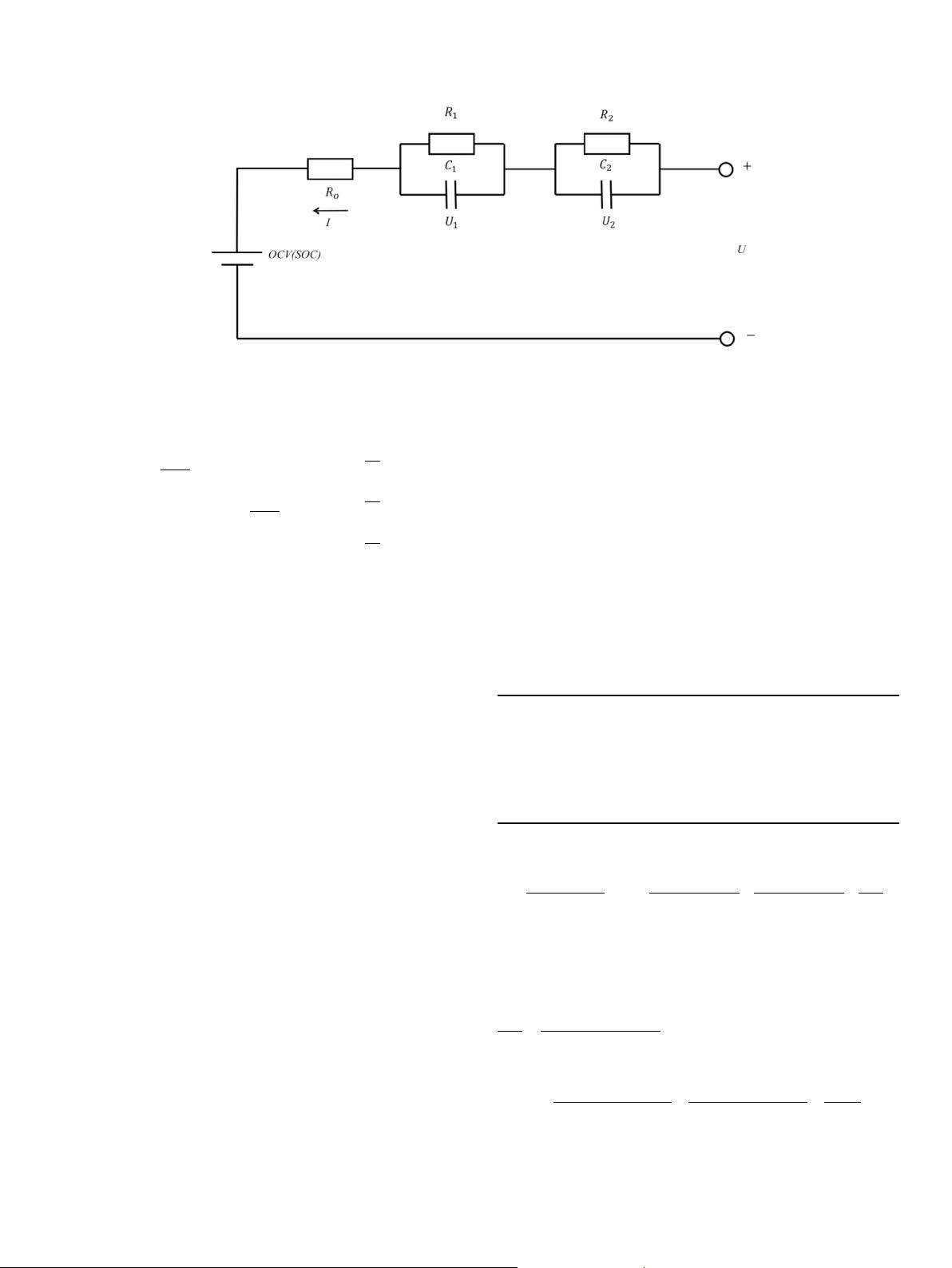
through advanced time scale separation algorithm. (1) A lumped parameter battery model was improved
for achieving accurate voltage estimate against different battery aging levels through an electrochemical
equation, which has enhanced the relationship of battery voltage to its State-of-Charge (SoC) and capac-
ity. (2) A multi-scale extended Kalman filtering was proposed and employed to execute the online mea-
sured data driven-based battery parameter and SoC estimation with dual time scales in regarding that the
slow-varying characteristic on battery parameter and fast-varying characteristic on battery SoC, thus the
battery parameter was estimated with macro scale and battery SoC was estimated with micro scale. (3)
The accurate estimate of battery capacity and SoC were obtained in real-time through a data-driven
multi-scale extended Kalman filtering algorithm. Experimental results on various degradation states of
lithium-ion polymer battery cells further verified the feasibility of the proposed approach.
Ó 2013 Elsevier Ltd. All rights reserved.
1. Introduction
To address the two urgent goals nowadays of protecting the
environment and achieving
energy sustainability, it is of strategic
significance on a global scale to replace oil-dependent vehicles with
electric vehicles. Battery, as an important on-board electric energy
storage, has been widely used in various electric vehicles. However,
to satisfy the operation voltage and traction power requirements of
electric vehicles, battery packs have to be made up of hundreds
of cells connected in series or parallel to overcome the limitations
of low energy density, low cell capacity and low cell voltage. But
how to avoid the adverse effect of cell inconsistency on battery pack
performanc
e and
prolong the service life of both the pack and the
cells are posing tremendous technological challenges to battery
State-of-Charge (SoC) and capacity estimation techniques. Its
accurate estimation is not only beneficial for the efficient vehicular
energy management, but also for the diagnosis and prognosis of the
battery behavior.
A wide variety of SoC estimation methods have been put forward
to improve battery SoC determination [1–16], each one has its own
advantage. The most commonly used methods fall into two major
categories: the lumped parameter battery model including equiva-
lent circuit models [1–9] and electrochemical model [10] based
SoC estimation method and the ‘‘black box’’ based methods, such
as artificial neural networks based methods [11–13], fuzzy logic
based methods [14,15] and support vector regression (SVR) based
0306-2619/$ - see front matter Ó 2013 Elsevier Ltd. All rights reserved.
http://dx.doi.org/10.1016/j.apenergy.2013.07.061
⇑
Corresponding author at: National Engineering Laboratory for Electric Vehicles,
School of Mechanical Engineering, Beijing Institute of Technology, No. 5 South
Zhongguancun Street, Haidian District, Beijing 100081, China. Tel./fax: +86 10 6891
4842.
E-mail addresses: rxiong6@gmail.com, rxiong@ieee.org (R. Xiong).
Applied Energy 113 (2014) 463–476
Contents lists available at ScienceDirect
Applied Energy
journal homepage: www.elsevier.com/locate/apenergy