
On Improving the Efficiency of Tensor Voting
Rodrigo Moreno, Member, IEEE, Miguel Angel Garcia, Member, IEEE,
Domenec Puig, Luis Pizarro, Bernhard Burgeth, and Joachim Weickert
Abstract—This paper proposes two alternative formulations to reduce the high computational complexity of tensor voting, a robust
perceptual grouping technique used to extract salient information from noisy data. The first scheme consists of numerical
approximations of the votes, which have been derived from an in-depth analysis of the plate and ball voting processes. The second
scheme simplifies the formulation while keeping the same perceptual meaning of the original tensor voting: The stick tensor voting and
the stick component of the plate tensor voting must reinforce surfaceness, the plate components of both the plate and ball tensor voting
must boost curveness, whereas junctionness must be strengthened by the ball component of the ball tensor voting. Two new
parameters have been proposed for the second formulation in order to control the potentially conflictive influence of the stick
component of the plate vote and the ball component of the ball vote. Results show that the proposed formulations can be used in
applications where efficiency is an issue since they have a complexity of order O(1). Moreover, the second proposed formulation has
been shown to be more appropriate than the original tensor voting for estimating saliencies by appropriately setting the two new
parameters.
Index Terms—Perceptual methods, tensor voting, perceptual grouping, nonlinear approximation, curveness and junctionness
propagation.
Ç
1INTRODUCTION
M
EDIONI and colleagues [1], [2], [3] proposed tensor
voting as a robust technique for extracting perceptual
structures from a cloud of points. This technique has been
proven versatile since it has been successfully adapted to
problems well beyond the ones to which it was originally
applied with excellent results (e.g., [3], [4] and references
therein).
Despite its effectiveness, tensor voting cannot be used in
applications where efficiency is an issue. This is mainly due
to the high computational cost of its classical implementa-
tion, especially regarding the plate and ball tensor voting.
This paper proposes two different ways of implementing
tensor voting efficiently. The first one is based on a numerical
approximation of the plate and ball tensor voting, which are
mainly responsible for the complexity of the original method.
The second one is based on a simplified formulation that
fulfills the same perceptual rules followed by tensor voting,
although reducing its numerical complexity.
This paper is organized as follows: Section 2 summarizes
the original formulation of tensor voting. Section 3 presents
the proposed numerical approach for implementing tensor
voting efficiently. Section 4 proposes a simplified version of
tensor voting based on the perceptual meaning of the stick,
plate, and ball tensor voting processes. Section 5 shows an
experimental comparison between the original tensor voting
and the two proposed schemes. Finally, Section 6 discusses
the obtained results and makes some final remarks.
2TENSOR VOTING
The formulation of tensor voting presented in this section is
different from, although equivalent to, the original for-
mulation in [3]. It has been chosen since it simplifies the
descriptions in the following sections.
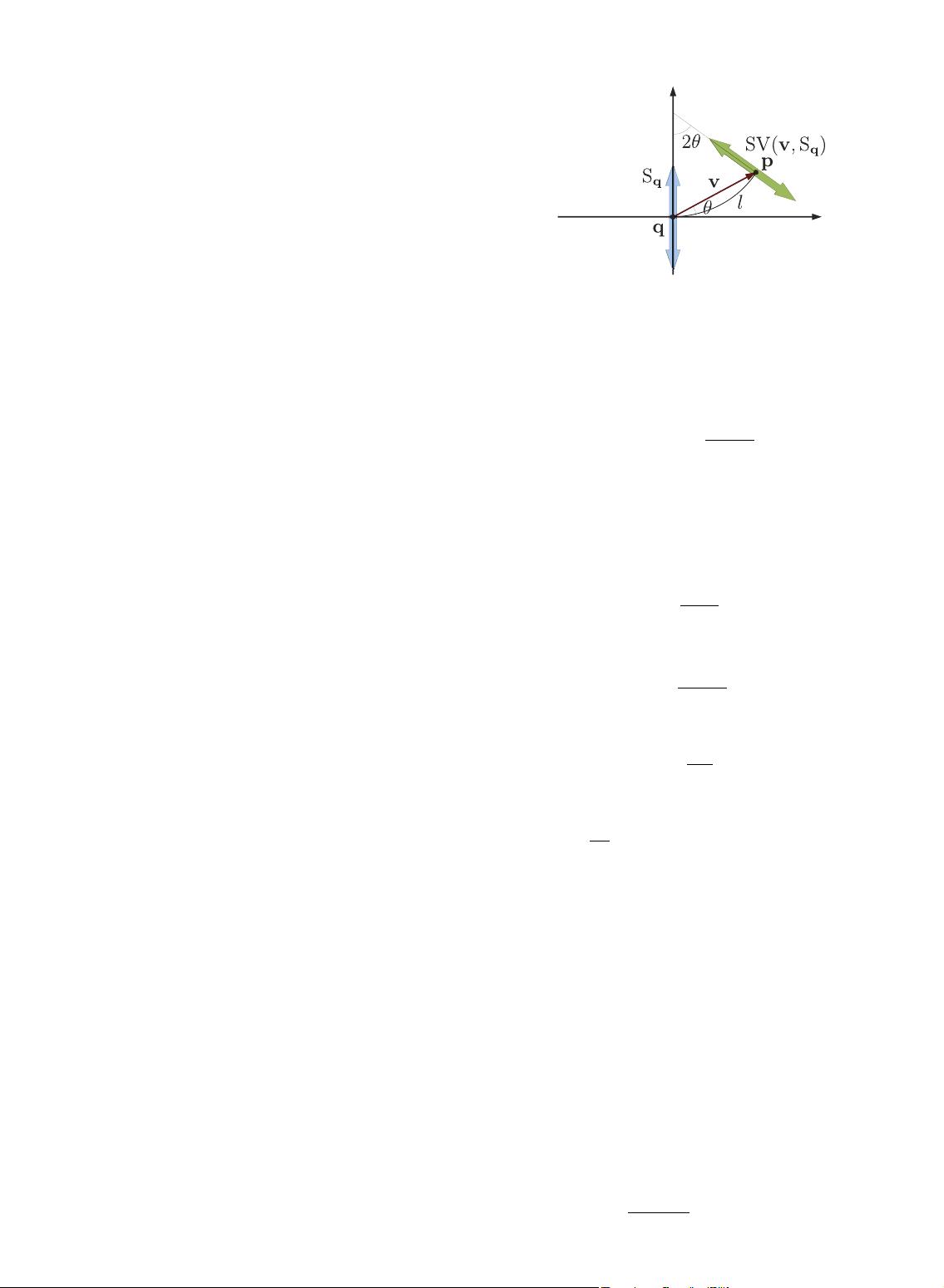
In 3D, tensor voting estimates saliency measurements of
how likely it is that a point lies on a surface, a curve, a junction,
or is noisy. It is based on the propagation and aggregation of
the most likely normal(s) encoded by means of tensors
through the so-called stick, plate, and ball tensor voting.
Tensor voting is comprised of three stages. In a first
stage, a tensor is initialized at every point of the given cloud
of points either with a first estimation of its normal or with a
ball- shaped tensor if such a priori information is n ot
available. Afterward, every tensor is decomposed into its
three components, namely, a stick,aplate, and a ball
component. Every component casts votes to the neighbor-
ing points by taking into account the information encoded
by the voter in that component. Every vote is a tensor that
encodes the most likely direction(s) of the normal at a
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 33, NO. 11, NOVEMBER 2011 2215
. R. Moreno is with the Center for Medical Image Science and Visualization
(CMIV) and the Department of Medical and Health Sciences (IMH),
Linko
¨
ping University, Campus US, IMT, 13th floor, Linko
¨
ping 58185,
Sweden. E-mail: rodrigo.moreno@liu.se.
. M.A. Garcia is with the Department of Electronic and Communications
Technology, Autonomous University of Madrid, Francisco Tomas y
Valiente 11, Madrid 28049, Spain. E-mail: miguelangel.garcia@uam.es.
. D. Puig is with the Intelligent Robotics and Computer Vision Group,
Rovira i Virgili University, Av. Paı
¨
sos Catalans 26, Tarragona 43007,
Spain. E-mail: domenec.puig@urv.cat.
. L. Pizarro is with the Department of Computing, Imperial College London,
180 Queen’s Gate, London SW7 2AZ, UK. He is also with the School of
Informatics Engineering, University Diego Portales, Av. Eje
´
rcito 441,
Santiago, Chile. E-mail: l.pizarro@imperial.ac.uk.
. B. Burgeth is with the Faculty of Mathematics and Computer Science,
Saarland University, Building E2 4, Saarbru
¨
cken 66041, Germany.
E-mail: burgeth@math.uni-sb.de.
. J. Weickert is with the Mathematical Image Analysis Group, Faculty of
Mathematics and Computer Science, Saarland University, Building E1 1,
Saarbru
¨
cken 66041, Germany. E-mail: weickert@mia.uni-saarland.de.
Manuscript received 7 Apr. 2010; revised 6 Oct. 2010; accepted 28 Dec. 2010;
published online 28 Jan. 2011.
Recommended for acceptance by C.-K. Tang.
For information on obtaining reprints of this article, please send e-mail to:
tpami@computer.org, and reference IEEECS Log Number
TPAMI-2010-04-0247.
Digital Object Identifier no. 10.1109/TPAMI.2011.23.
0162-8828/11/$26.00 ß 2011 IEEE Published by the IEEE Computer Society
剩余13页未读,继续阅读
资源评论


O天涯海阁O
- 粉丝: 1554
- 资源: 90









最新资源
- 纯真IP库,用于ip查询地址使用的数据库文件
- 基于javaweb的动漫网站管理系统毕业设计论文.doc
- 废物垃圾检测28-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 探索CSDN博客数据:使用Python爬虫技术
- 基于tensorflow和cnn做的图像识别,对四种花卉进行了分类项目源代码+使用说明,可识别:玫瑰花、郁金香、蒲公英、向日葵
- 基于Java的电影订票网站的设计与开发毕业设计论文.doc
- ODrive 固件 0.5.6
- 停电自动关机程序.EXE
- RabbitMQ 的7种工作模式
- 基于java的大学生二手书在线买卖系统论文.doc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


