电机控制学习笔记以及控制仿真
需积分: 0 136 浏览量
2023-10-17
09:46:06
上传
评论
收藏 531KB DOCX 举报

实验建模
电机一些简单的基础知识
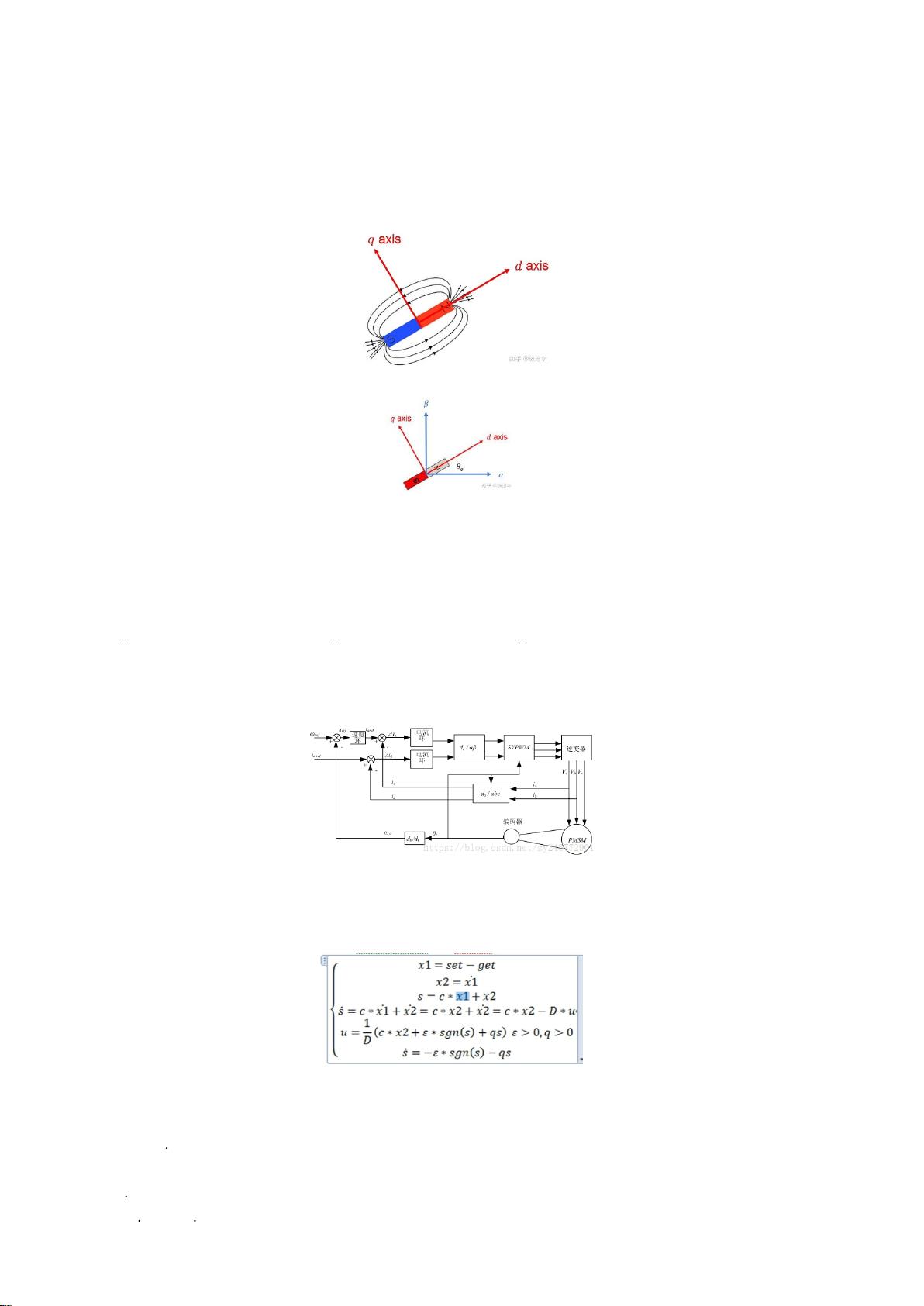
矩形磁铁的 N-S 极,其中 d 的方向是 N 磁感线出发的方向,q 是垂直这个方向,d 是控制磁链,q 是控制转矩的。d-q 坐标系是固定
在转子上的。α-β坐标轴是固定在定子上,这俩坐标系之间会有个夹角
𝜃
𝑒
,该角度对时间的导数就是电角速度
𝑤
𝑒
.转子实际转过的
角度叫做机械角度
𝜃
𝑚
,转子实际转动的角速度是
𝑤
𝑚
。
图 1 d-q 的示意图
图 2 夹角
三相电压源逆变器 PWM 技术(2023/9/24)
矢量控制的目的:解耦复杂的定子电流关系,使三相交流电机能像控制直流电机一样简单。
在反 Park 变换以后得到两相静止坐标下的
𝑉
𝛼
,
𝑉
𝛽
,用其控制三相逆变器的功率管模拟旋转矢量。从而产生了 SVPWM(空间矢量脉
宽调制)。SVPWM 控制基础矢量的合成,作用时间,合成需要的矢量,其合成的矢量在空间中近似一个圆形。由推理得基础矢量为
基础矢量 =
2
3
𝑈
𝑎𝑐
𝑒
𝑗𝑤𝑡
所以基础矢量的幅值为:
2
3
𝑈
𝑎𝑐
。故可以组成一个幅值为
2
3
𝑈
𝑎𝑐
的圆形(延迟环节)。共有八种组合,将复平面分为
6 个扇区。控制基本矢量作用的时间 T,可以合成不同的空间矢量,最终近似为一个圆形。
三相永磁同步电机的建模(2023/9/25)
图 3 PWSM 控制框图
滑膜控制原理(2023/9/29)
图 4 滑膜控制公式
𝑋
1
是误差,
𝑋
2
是误差的变化率。最终的目的是使误差和误差的变化率为 0.所要满足的条件是 S=0。
提出问题:怎么设计才能使 S=0 呢?
答:只需满足 S 和
𝑆
的符号相反即可(类似于速度和加速度,只要两者相反,最终会变为 0,不考虑匀速状态)
第一步:对 S 求导;
第二步:将
𝑋
2
用趋近律函数代替(用于趋近某一函数可以在其周围来回波动);
第三步:得出
𝑆
,此时 S*
𝑆
<0,两者方向总是相反的;满足设计要求
资源评论













