目录
一、 康耐视相机具体设置..........................................................................................................................3
软件安装...........................................................................................................错误!未定义书签。
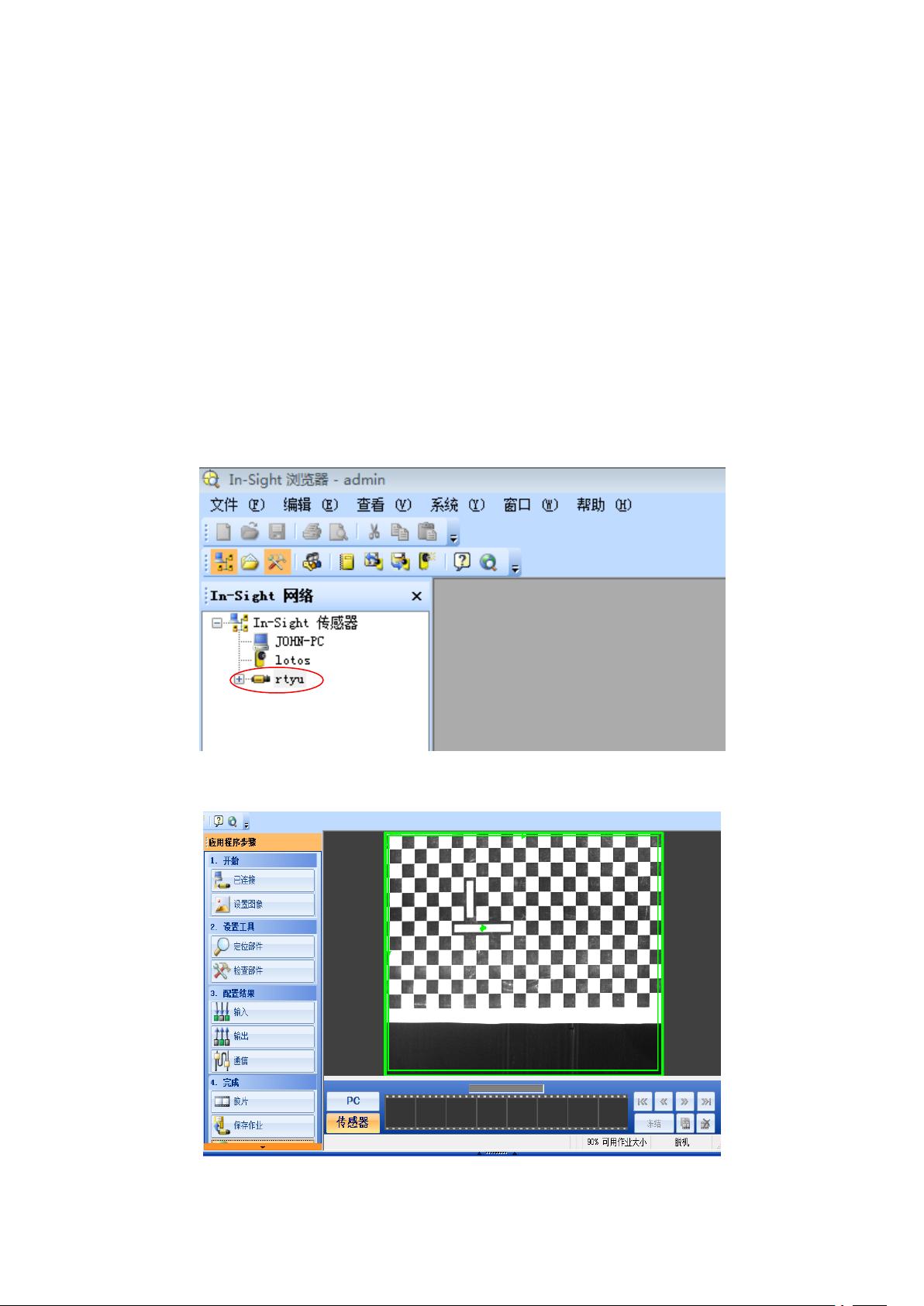
流程编辑 ..........................................................................................................................................3
CODESYS 通信考前须知 ..................................................................................................................6
二、 相机标定..............................................................................................................................................7
相机校准 ..........................................................................................................................................7
绝对坐标实现 ..................................................................................................................................9
相对坐标实现 ................................................................................................................................10
三、 示教器例如程序................................................................................................................................11
绝对坐标实现范例 ........................................................................................................................11
相对坐标实现范例 ........................................................................................................................11
四、 CODESYS 逻辑开发........................................................................................................................13
SOCKET 通信开发 ..........................................................................................................................13
外部点数据处理 ............................................................................................................................14
五、 细节说明............................................................................................................................................17