PIDAT(19
1)
S
C
D
〔SV〕。
C+1 字用于设置比例带,由用户在整定时确定,取值范围为 0001~270FH〔或十进
制数 1~9999〕。
C+2 字用于积分时间设置,由用户在整定时确定,取值范围为 0001~1FFFH〔或十
进制数 1~8189〕。
C+3 字用于微分时间设置,由用户在整定时确定,取值范围为 0000~270FH〔或十
进制数 0~9999〕。
C+4 字用于采用周期设置,由用户在编程时确定,取值范围为 0000~270FH〔或十
进制数 0~9999〕,单位为 0.s。
C+5 字用于设置 4 个参数,00 位用于设定比例的作用方向,为 0 时正向,为 1 时,
反向;01 位用于修改 PID 参数的设定,为 0 时 PID 参数只在执行条件的上升沿时修
改,即 PID 在执行过程中不能修改,为 1 时 PID 参数字指令开始执行时修改;03 位
用于控制输出变量设定,由用户在编程时确定,为 0 输出 0%,为 1 输出 50%;04
~15 位用于滤波系数设定,由用户在整定时确定,取值只能是二进制数,范围为
100~163H;2 位不用。
〔举例说明:00 位说明,输入值小于设定值时,为反向及为 1;输入值大于设定值为
正向及为 0。 03 位只有 P 调解时使用。〕
C+6 字也是有 4 个参数设置,00~03 位用于设定输出数据的位数,0 是 8 位,1 是
9 位,依次类推,8 是 16 位〔最多〕,04~07 位为积分和微分单位设定,1 是采样
周期倍数,9 是单位时间为 100ms;08~11 位是输入数据位数设定,0~8 对应 8
到 16 位数据;12 位用于对输出控制变量是否要加限位,为 0 无限位,为 1 有限位;
13~15 位不用。、
〔举例说明:现有模拟模块型号为 CPM1A-MAD02-CH 输入、输出分辨率为 8 位,
及输入输出为 8 位,具体见“CPM1A-MAD02-CH”手册,因此 00-03 位为 0,08-11
位为 0。〕
C+7 用于输出变量的下限设定,当 C+6 的 12 位设定为 1 时该字的设定才有效,设
定范围为 0000~FFFFH。
C+8 用于输出变量的上限设定,当 C+6 的 12 位设定为 1 时该字的设定才有效,设
定范围为 0000~FFFFH。
对于缺乏实际编程经验的用户来讲,使用 PID 来进行参数整定很繁复。因此,假设使
用 PIDAT 自整定控制指令,将给用户的使用提供简便方法。
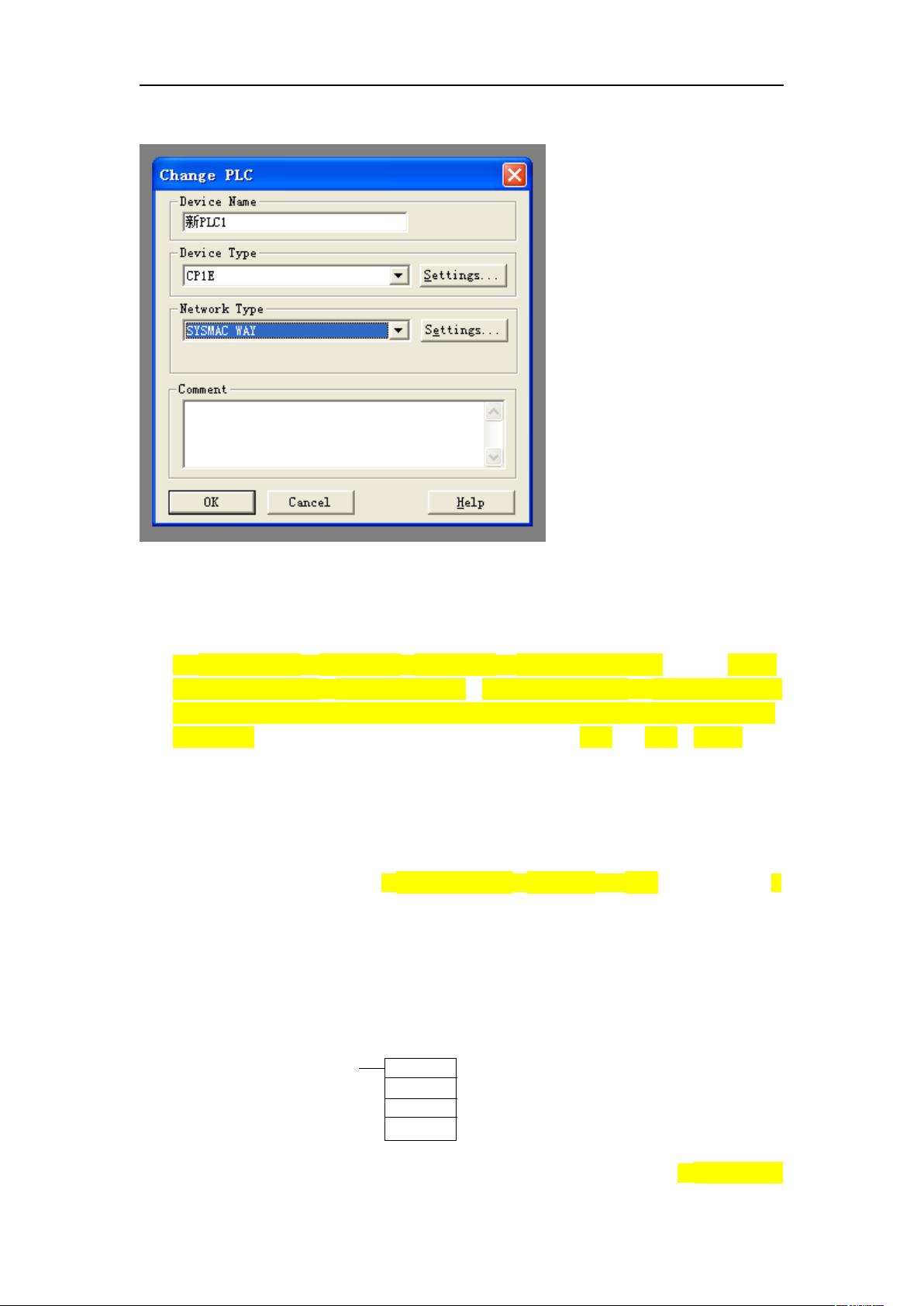
〔2〕PID 自整定控制指令 PIDAT(191)
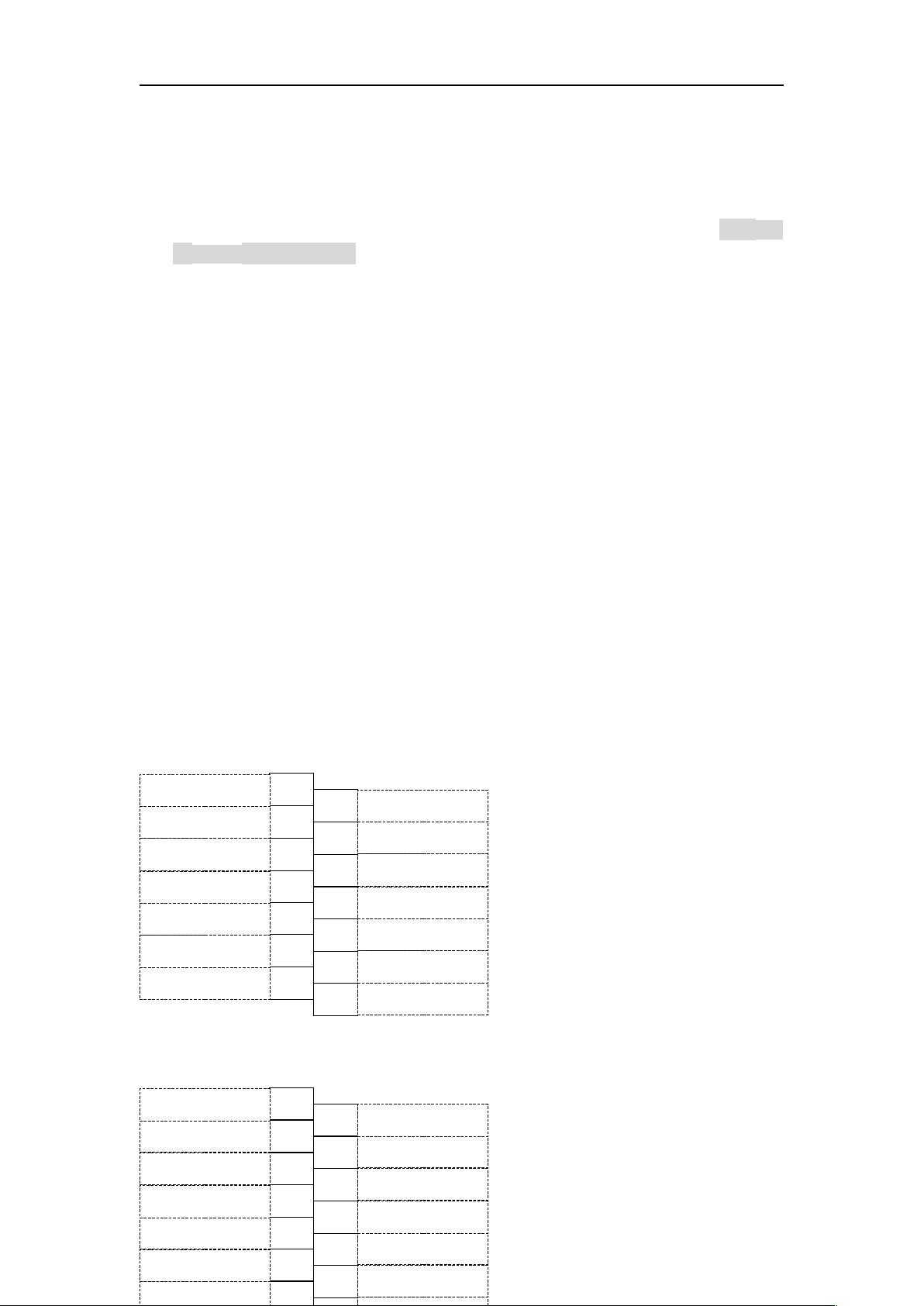
PIDAT(191)指令的梯形图如图 3-73 所示,它与 PID(190)梯形图的含义大致相同,
不同的是 PLC 可根据需要自动计算 P、I、D 参数,并实现 PID 控制。S 为输入字,D
为输出字,C 为参数字。参数 C 的设置含义从 C~C+40,其中 C~C+10 的 11 个字
需要用户设置,其余 C+11~C+40 的 30 个字为指令工作区,用户不可占用。
图 3-73 PIDAT 指令的梯形图
对于 PIDAT(191)指令参数区中用户需要设置的 11 个字,前 9 个字 C~C+8 的设
置和上述 PID(190)指令的设置相同,只是 PID 参数〔即 C+1~C+3〕可以不设而由
自整定功能自动设置。〔区别〕因此,下面简要介绍 C+9 字~C+10 字的参数设定。
3
















评论0