

- -.
S7-200 PLC 脉冲输出 MAP 库文件的使用
Application of S7-200 PTO MAP Lib
Getting Start Edition (2011 年 3 月)
摘要
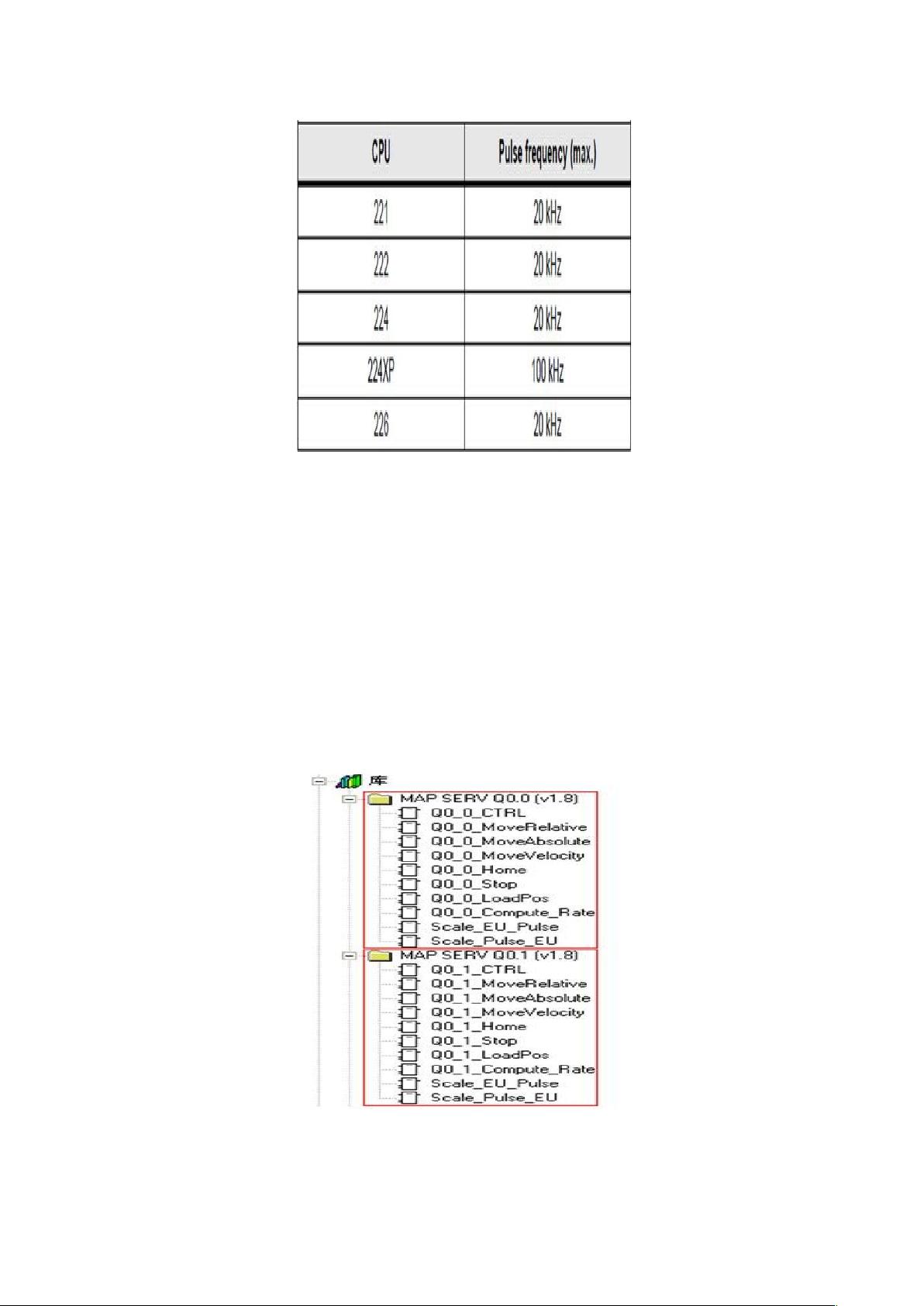
该文档提供了 S7-200 PLC 脉冲输出指令库MAP 的使用说明。该库基于 S7-200 PLC 本体脉冲输出指令,
用于帮助用户实现较复杂的定位功能,控制伺服驱动或步进电机。
关键词
S7-200 PLC;脉冲输出;MAP
Key Words
S7-200 PLC;PTO;MAP
目录
1 概述
2 MAP 库的应用
2.1 MAP 库的根本描述
2.2 输入输出点定义
2.3 MAP 库的背景数据块
2.4 功能块介绍
- 优选


剩余33页未读,继续阅读
资源评论


zdxlya87
- 粉丝: 0
- 资源: 6万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


