基于AT89S51单片机的远程温度控制系统设计资料.doc
版权申诉


引言
温度是工业生产中常见的被控参数之一。从食品生产到化工生产,从燃料生产到钢
铁生产等等,无不涉及到对温度的控制,可见,温度控制在工业生产中占据着非常重要
的地位,而且随着工业生产的现代化,对温度控制的速度和精度也会越来越高。近年来,
温度控制领域发生了很大的变化,工业生产中对温度的控制不再局限于近距离或者直接
的控制,而是需要进行远距离的控制,这就产生了远程温度控制。
远程温度控制的通信方式有多种,如通过网络,无线电等等。每一种方式都有其优
点和缺点。利用无线电通信,方便、灵活,而且经济。它不需要像网络控制耗费巨大的
通信资源,也不受网络速度的影响。
在温度控制的方法上,传统的控制方法(包括经典控制和现代控制)在处理具有非线
形或不精确特性的被控对象时十分困难。而温度系统为大滞后系统,较大的纯滞后可引
起系统不稳定。
在温度采集方法上,通常是利用热电偶把热化为电信号,再通过 A/D 转换得到温度
值。这种方法速度慢,而且精度不是很高。综合上面的考虑以及自己的爱好,设计了基
于无线电通信的远程温度控制系统。本文详细的介绍了系统的硬件设计,软件设计,以
及调试等,希望它能给初级电子制作爱好者带来一些无线电通信和温度控制的基本常识,
以及应该注意的一些事项。
1、温度控制的发展及意义
在人类的生活环境中,温度扮演着极其重要的角色。无论你生活在哪里,从事什么
工作,无时无刻不在与温度打着交道。自 18 世纪工业革命以来,工业发展对是否能掌
握温度有着绝对的联系。在冶金、钢铁、石化、水泥、玻璃、医药等等行业,可以说几
乎%80 的工业部门都不得不考虑着温度的因素。
现代工业设计、工程建设及日常生活中常常需要用到温度控制,早期温度控制主要
应用于工厂中,例如钢铁的水溶温度,不同等级的钢铁要通过不同温度的铁水来实现,
这样就可能有效的利用温度控制来掌握所需要的产品了。在现代社会中,温度控制不仅
应用在工厂生产方面,其作用也体现到了各个方面,随着人们生活质量的提高,酒店厂
房及家庭生活中都会见到温度控制的影子,温度控制将更好的服务于社会。
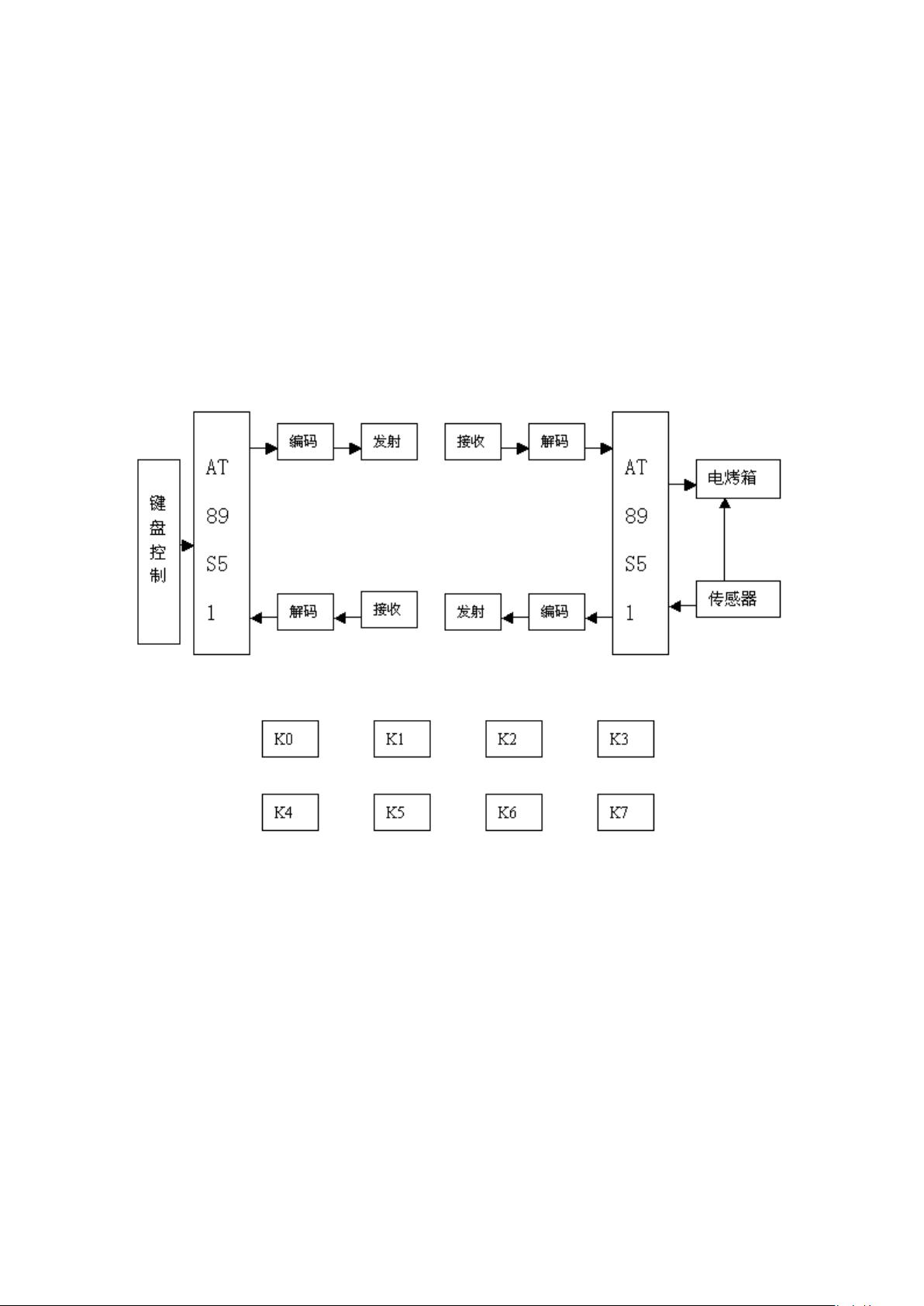
2 总体设计与可行性分析
2.1 设计任务
1、利用所学的知识设计远程温度控制系统。电烤箱温度可在一定范围内由人工设
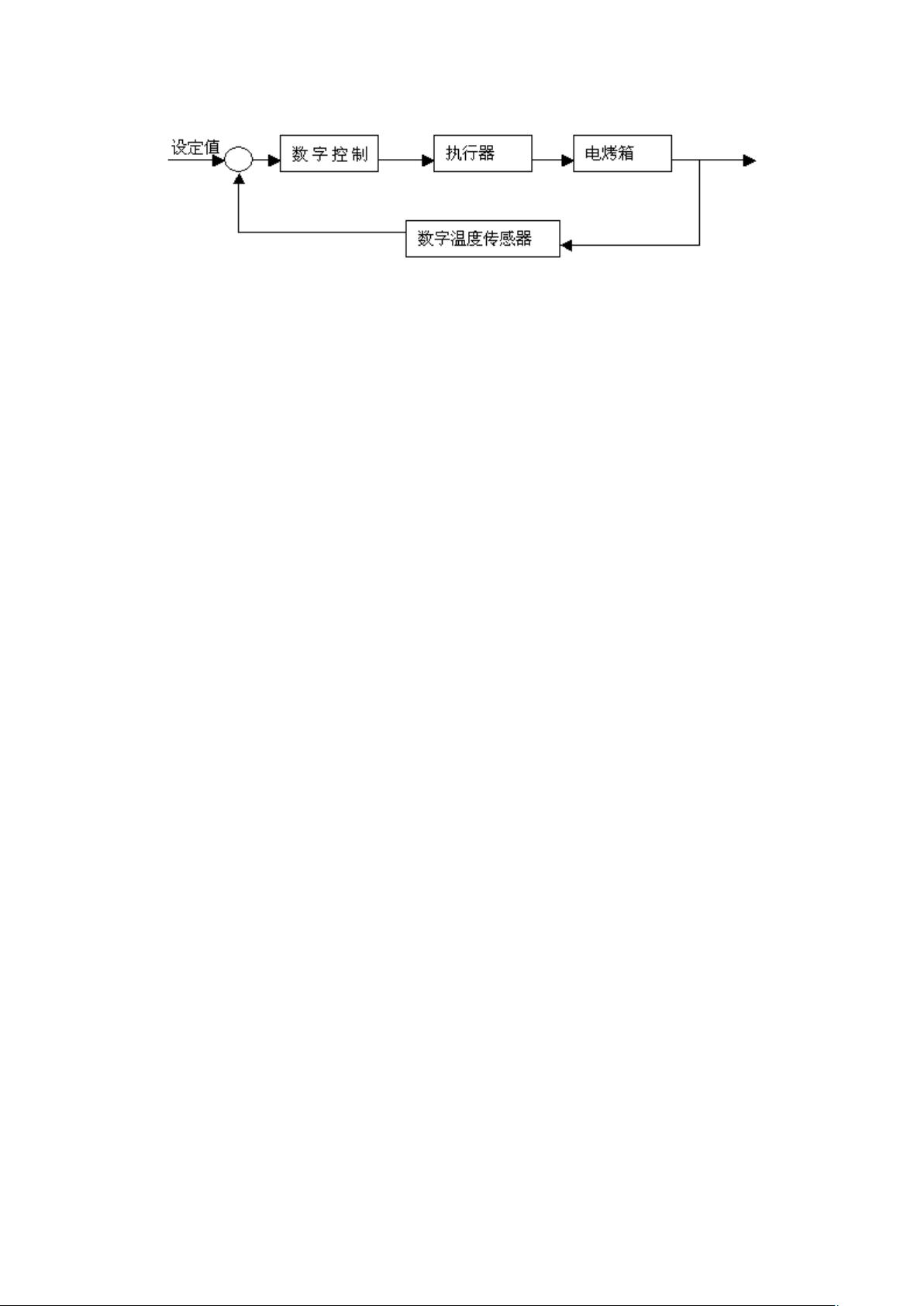
定,温度信号检测方案自行确定,用单片机采用 PID 控制算法实现温度实时控制,静态
误差 1 度,超调量〈2.5%,系统温度调节时间 ts〈4 分钟。控制输出采用脉冲移相触发
可控硅来调节加热有效功率。控制温度范围室温--125℃,用十进制数码显示箱内的温
度。
2、采用 PID 控制算法实现温度实时控制,并显示温度实际值。


剩余53页未读,继续阅读
资源评论

 2301_769824962023-12-16这个资源对我启发很大,受益匪浅,学到了很多,谢谢分享~
2301_769824962023-12-16这个资源对我启发很大,受益匪浅,学到了很多,谢谢分享~

悠闲饭团
- 粉丝: 151
- 资源: 3303

下载权益

C知道特权

VIP文章

课程特权
开通VIP











