linuxSPI驱动框架源码分析.pdf
版权申诉
140 浏览量
2021-11-25
10:05:13
上传
评论
收藏 746KB PDF 举报

SPI 协议是一种同步的串行数据连接标准,由摩托罗拉公司命名,可工作于全双工模式。相
关通讯设备可工作于 m/s 模式。主设备发起数据帧,允许多个从设备的存在。每个从设备
有独立的片选信号, SPI 一般来说是四线串行总线结构。
接口:
SCLK —— Serial Clock(output from master) 时钟 (主设备发出 )
MOSI/SIMO —— Master Output, Slave Input(output from master) 数据信号线 mosi( 主设备
发出 )
MISO/SOMI —— Master Input,Slave Outpu(output from slave) 数据信号线 (从设备 )
SS —— Slave Select(active low;output from master) 片选信号
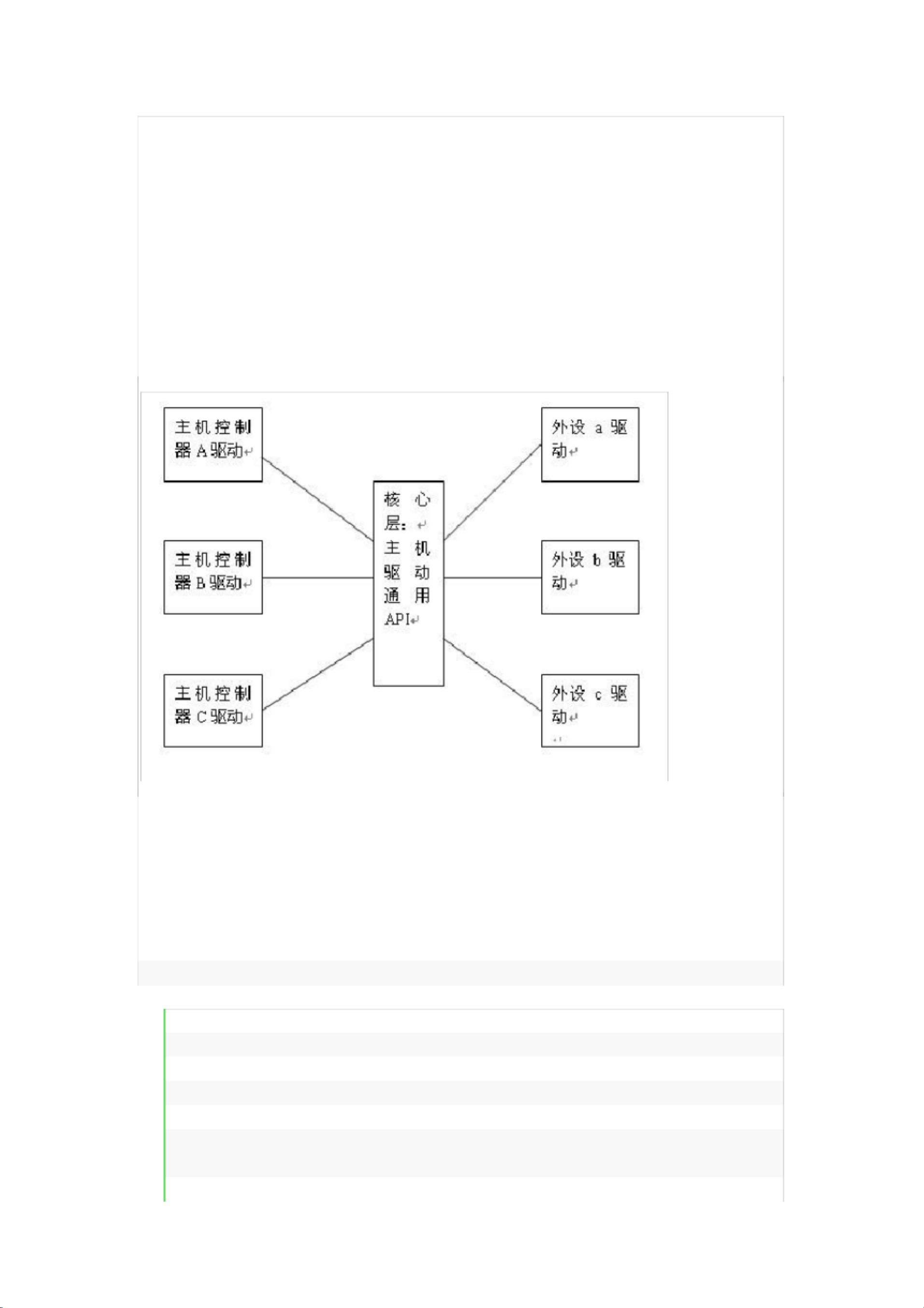
下面来看一下 Linux 中的 SPI 驱动。在 Linux 设备驱动框架的设计中,有一个重要的主机,
外设驱动框架分离的思想,如下图。
外设 a,b,c 的驱动与主机控制器 A,B,C 的驱动不相关,主机控制器驱动不关心外设, 而外设
驱动也不关心主机,外设只是访问核心层的通用的 API 进行数据的传输,主机和外设之间
可以进行任意的组合。如果我们不进行如图的主机和外设分离,外设 a,b,c 和主机 A,B,C 进
行组合的时候,需要 9 种不同的驱动。设想一共有个主机控制器, n 个外设,分离的结构是
需要 m+n 个驱动,不分离则需要 m*n 个驱动。
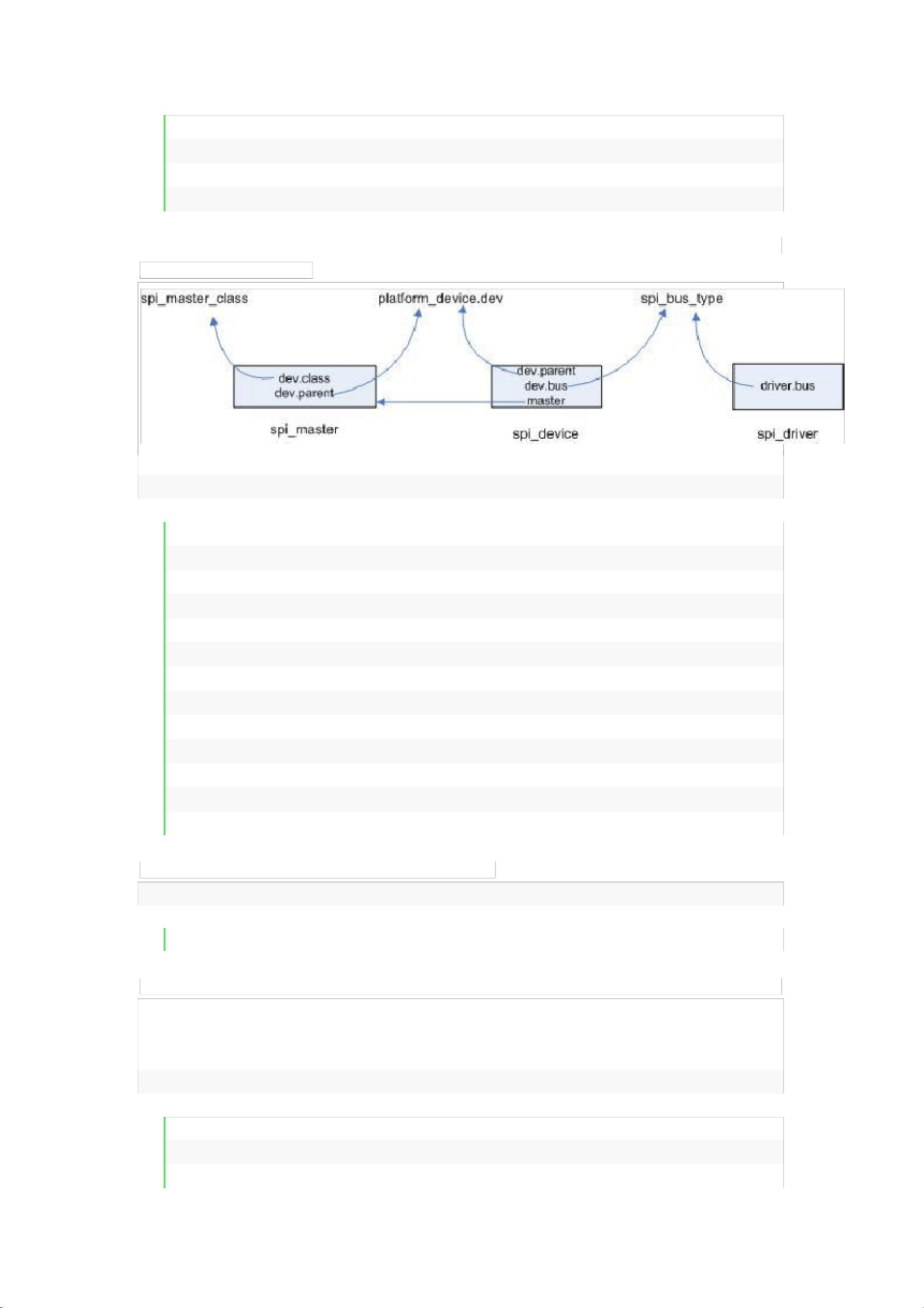
下面介绍 spi 子系统的数据结构:
在 Linux 中,使用 spi_master 结构来描述一个 SPI 主机控制器的驱动。
view plain
1. <span style= "font-size:18px;" >struct spi_master {
2. struct device dev; /* 总线编号,从 0 开始 */
3. s16 bus_num; /* 支持的片选的数量,从设备的片选号不能大于这个数量 */
4. u16 num_chipselect;
5. u16 dma_alignment; /* 改变 spi_device 的特性如:传输模式,字长,时钟频率 */
6. int (*setup)( struct spi_device *spi); /* 添加消息到队列的方法,这个函数不可睡眠,他的任务是安排发生的传送
并且调用注册的回调函数 complete()*/
7. int (*transfer)( struct spi_device *spi, struct spi_message *mesg);

剩余30页未读,继续阅读
资源评论


yusuyuan1
- 粉丝: 1
- 资源: 3万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











