
Uavcan 与 px4 实践操作
尉世乾 2017 年 7 月 5 日
一、 背景知识
1. CAN 总线简介:
控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使
用两根线通过差分信号来传输,是世界上应用最广泛的现场总线之一。CAN 协议最早是由德国的 Robert
Bosch 公司开发,用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。
2. CAN 总线特点:
实时性强、传输距离较远(40m 距离 1Mbit/s)、可在高噪声干扰环境中工作,抗电磁干扰能力强(差分
信号)、成本低(仅需两根导线+收发器)等优点;
物理接口电平具有优先权和仲裁功能
发送的信息遭到破坏后,可自动重发
CRC 检验
Payload 部分最长 8 个字节
位填充编码
3. 分类
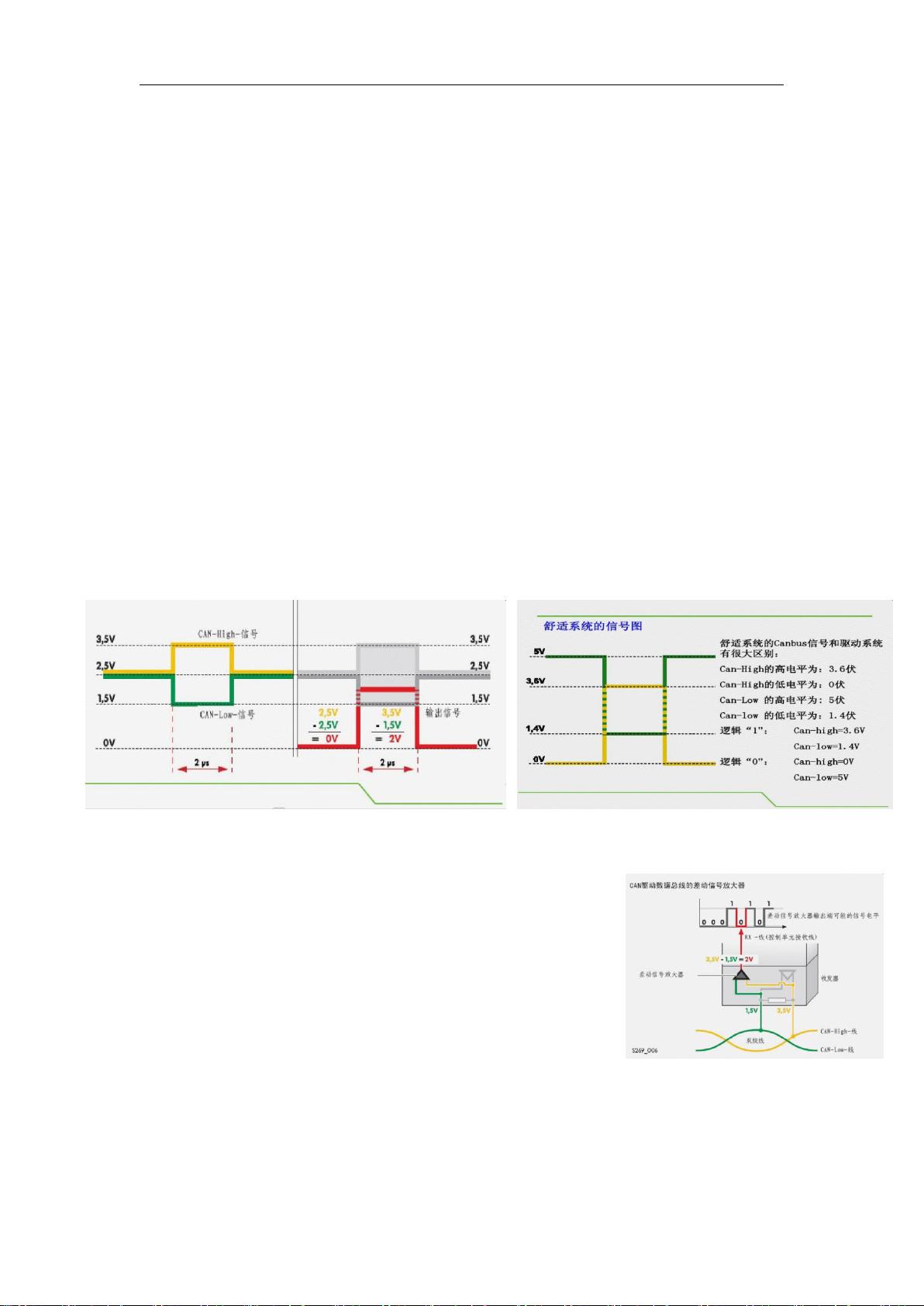
CAN 总线分为高速 can(动力 CAN:500kbit/s 到 1Mbit/s,不过也可以低于 500kbit/s)与低速 CAN(舒
适 can,100kbit/s),我们在嵌入式开发中用到的是高速 CAN 总线
高速 CAN 低速 CAN
4. 显隐电平
以高速 CAN 为例,引入一个显隐电平的概念:
显性电平:逻辑 0(CANH-CANL 差分电压为正)
隐形电平:逻辑 1(CANH-CANL 差分电压为 0)
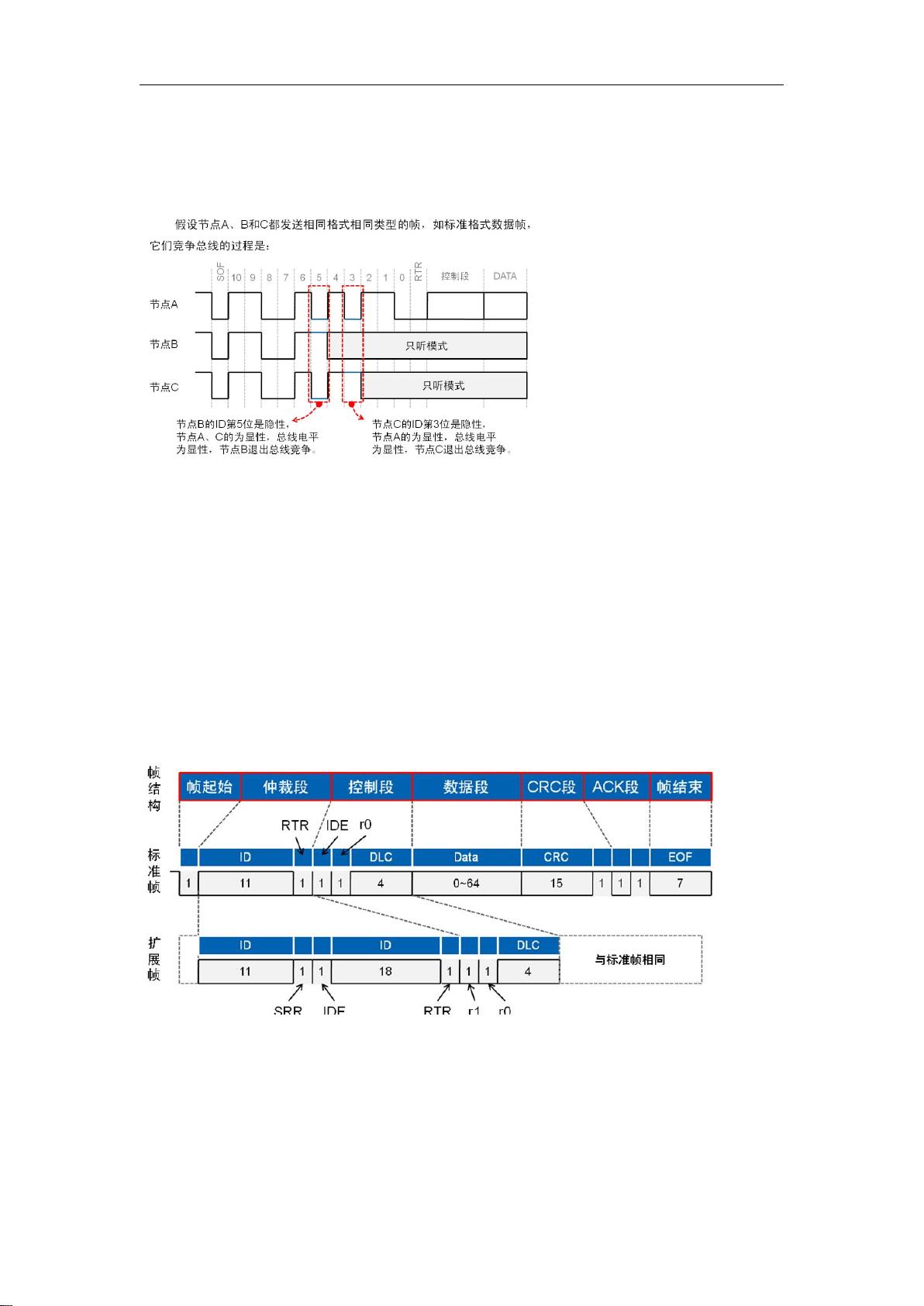
CAN 总线上,“显性”的优先级要高于“隐性”;当“显性”位和“隐性”位同时发送到总线上时,总线上
的数值表现为“显性”。
可以理解为:
逻辑 1-->“隐性”,总线处于高阻,任何一个 CAN 节点都可以将总线驱动成“显性”。
逻辑 0-->“显性”,在总线上的电平优先级要高于“隐性”
剩余10页未读,继续阅读
资源评论

 zwb_5782091602022-07-11比较详细和适用,对于我这种菜鸟和指导意义。
zwb_5782091602022-07-11比较详细和适用,对于我这种菜鸟和指导意义。- Darren8888882024-12-11#完美解决问题 #运行顺畅 #内容详尽 #全网独家 #注释完整非常不错,解决了我的问题,感谢


laixiong_embed
- 粉丝: 14
- 资源: 39









最新资源
- 混合储能容量优化配置(钠硫电池、超级电容) 基于emd和vmd容量配置 1、先用vmd进行输入功率分解,通过分解出高频信号和低频信号,混合储能的功率分配,分给钠硫电池、超级电容 2、分解后再求出储能
- 地方撒旦法撒旦法阿斯蒂阿斯蒂芬阿斯蒂芬
- 基于新算法SSA优化变分模态分解的混合储能功率分配策略 1、vmd、emd、ssavmd分解风电功率 2、高频给超级电容、低频给蓄电池 3、适应值函数由样本墒、聚合代数、Pearson构成创新性比较大
- (27498636)编译原理期末考试复习试卷.zip
- (29904250)东北大学软件学院数据库期末复习资料.zip
- MazeSolver-迷宫求解
- (341206)北京邮电大学DB课件
- 环境1234567890
- (5160852)matlab和神经网络
- (156091036)5V-12V可调直流稳压电源multisim仿真源文件
- (170525250)基于springmvc+tomcat+mysql的房屋租赁系统
- (175587632)基于Springboot的实习管理系统
- (175828610)ssm房屋租赁系统源码数据库演示.zip
- 华为HCIA刷题题库全部
- (176108834)三段式电流保护,MATLAB simulink仿真文件,联系就发,相对于的参数可自行修改,有对应波形图 还有一个对应的pdf(
- (176109036)三段式电流保护Matlab编程/ Simulink仿真 1. Matlab编程计算三段式电流保护的整定值,并进行灵敏度校验; 2
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


