opencv最全修改版中文参考手册
需积分: 44 107 浏览量
2012-10-29
21:36:48
上传
评论
收藏 1.56MB DOC 举报

Cv 中文参考手册
Cv 图像处理
,自由的百科全书
注意本章描述图像处理和分析的一些函数。大多数函数都是针对两维象素数组的,
这里,我们称这些数组为“图像”,但是它们不一定非得是 结构,也可以是
或者 结构。
梯度、边缘和角点
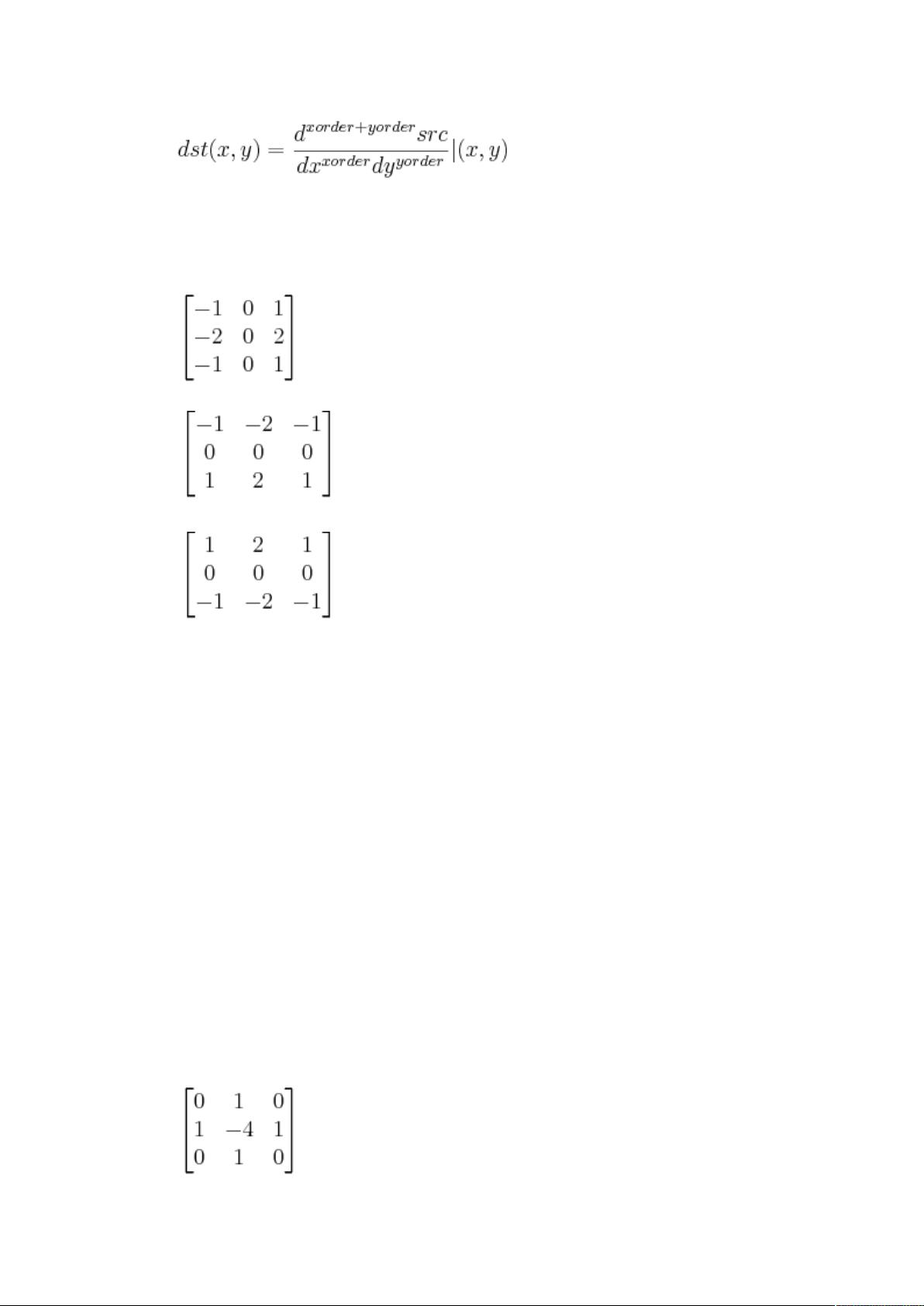
使用扩展算子计算一阶、二阶、三阶或混合图像差分
!"#$%
&'
输入图像(
输出图像(
方向上的差分阶数
方向上的差分阶数
!"#
扩展 核 的 大 小 , 必 须 是 )%* 或 + 。 除 了 尺 寸 为 ) , 其 它 情 况 下 ,
!"#,!"#可分离内核将用来计算差分。对!"#$) 的情
况, 使用 %) 或 )% 内 核 ( 不 进 行 高 斯 平 滑 操 作 ) 。 这 里 有 一 个 特 殊 变 量
-".//$0)&,对应%%1滤波器,可以给出比%%滤波更精确的
结果。1滤波器系数是:
对0方向以及转置矩阵对 0方向。
函数通过对图像用相应的内核进行卷积操作来计算图像差分:



剩余63页未读,继续阅读
资源评论













