
.小车控制及驱动单元的选择
此部分是整个小车的大脑,是整个小车运行的核心部件,起着控制小车所有运行状态的作用。通常选
用单片机作为小车的核心控制单元,本文以台湾凌阳公司的 SPCE061A 单片机为例予以介绍。SPCE061
是一款拥有 2K RAM、32KFlash、32 个 I/O 口,并集成了 AD/DA 功能强大的 16 位微处理器,它还拥
有丰富的语音处理功能,为小车的功能扩展提供了相当大的空间。只要按照该单片机的要求对其编制程序
就可以实现很多不同的功能。
小车驱动电机一般利用现成的玩具小车上的配套直流电机。考虑到小车必须能够前进、倒退、停止,
并能灵活转向,在左右两轮各装一个电机分别进行驱动。当左轮电机转速高于右轮电机转速时小车向右转,
反之则向左转。为了能控制车轮的转速,可以采取 PWM 调速法,即由单片机的 IOB8、IOB9 输出一系列
频率固定的方波,再通过功率放大来驱动电机,在单片机中编程改变输出方波的占空比就可以改变加到电
机上的平均电压,从而可以改变电机的转速。左右轮两个电机转速的配合就可以实现小车的前进、倒退、
转弯等功能。
2.小车循迹的原理
这里的循迹是指小车在白色地板上循黑线行走,通常采取的方法是红外探测法。
红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,在小车行驶过程中不
断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收;
如果遇到黑线则红外光被吸收,小车上的接收管接收不到红外光。单片机就是否收到反射回来的红外光为
依据来确定黑线的位置和小车的行走路线。红外探测器探测距离有限,一般最大不应超过 15cm。对于发
射和接收红外线的红外探头,可以自己制作或直接采用集成式红外探头。
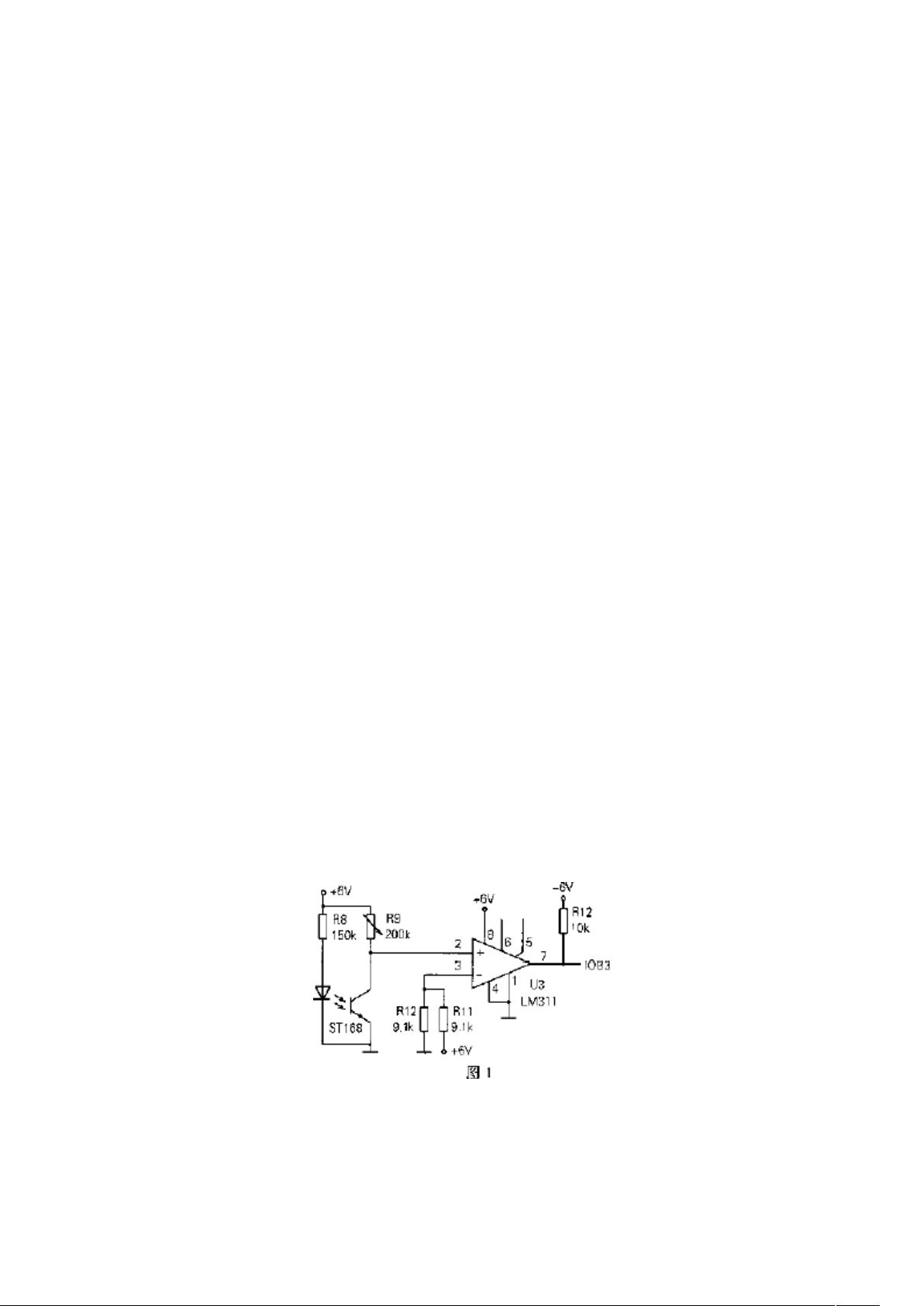
(1)自制红外探头电路如图 1 所示,红外光的发送接收选用型号为 ST168 的对管。当小车在白色地面
行驶时,装在车下的红外发射管发射红外线信号,经白色反射后,被接收管接收,一旦接收管接收到信号,
那么图中光敏三极管将导通,比较器输出为低电平;当小车行驶到黑色引导线时,红外线信号被黑色吸收
后,光敏三极管截止,比较器输出高电平,从而实现了通过红外线检测信号的功能。将检测到的信号送到
单片机 I/O 口,当 I/O 口检测到的信号为高电平时,表明红外光被地上的黑色引导线吸收了,表明小车处
在黑色的引导线上;同理,当 I/O 口检测到的信号为低电平时,表明小车行驶在白色地面上。此种方法简
单,价格便宜,灵敏度可调,但是容易受到周围环境的影响,特别是在图 1 较强的日光灯下,对检测到的
信号有一定的影响。
(2)集成式红外探头可以采用型号为 E3F-DS10C4 集成断续式光电开关探测器,它具有简单、可靠的
工作性能,只要调节探头上的一个旋钮就可以控制探头的灵敏度。该探头输出端只有三根线(电源线、地
资源评论

 枫界易城2013-12-26里面关于智能小车寻迹的东西讲的太少了。而且还不全,还有分数太高了
枫界易城2013-12-26里面关于智能小车寻迹的东西讲的太少了。而且还不全,还有分数太高了












