目 录
摘要..........................................................................1
关键字:电子秤、电子应变片、A/D 转换器,显示电路 ..........................1
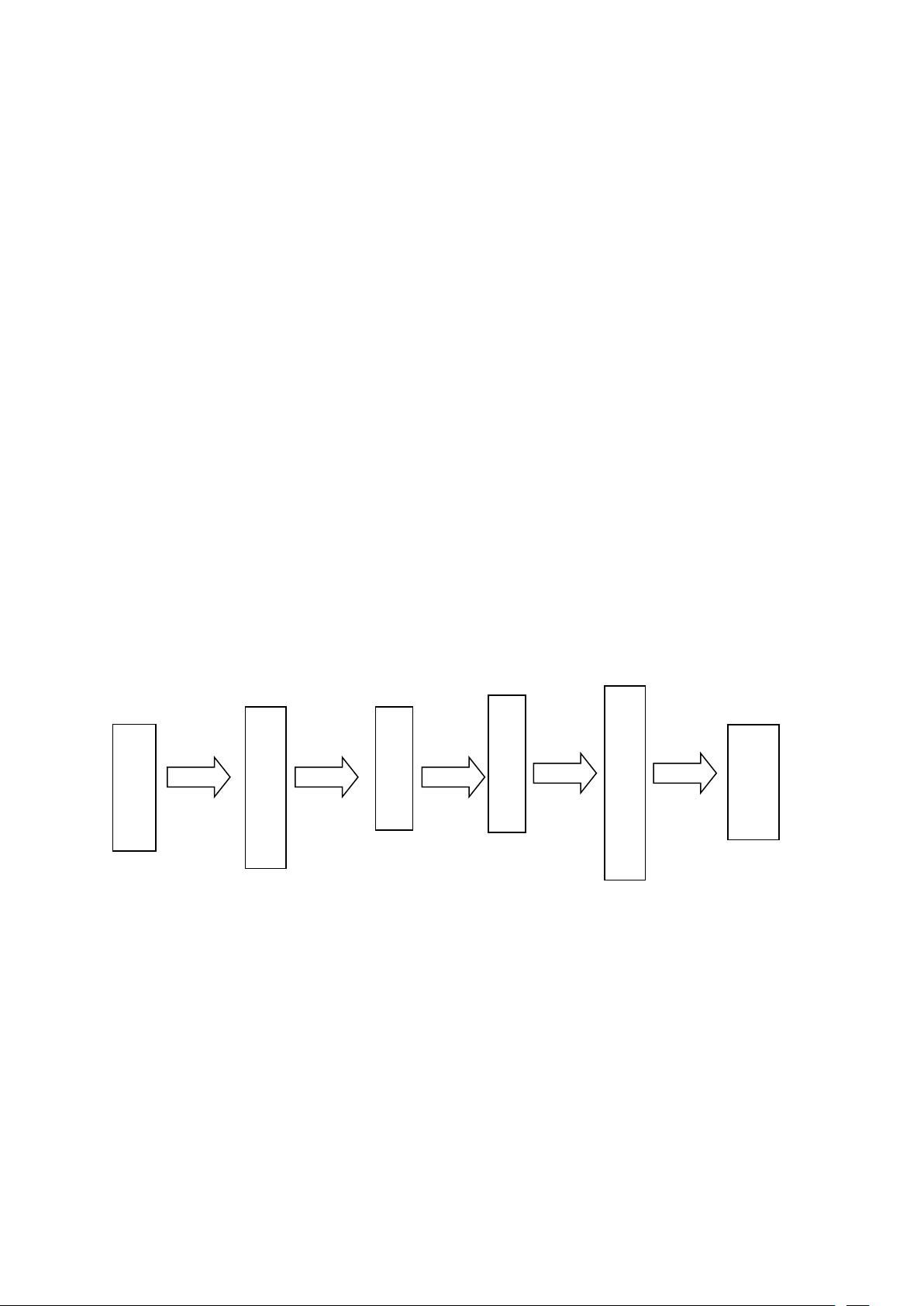
一、系统整体描述..............................................................1
二、 系统模块设计.............................................................2
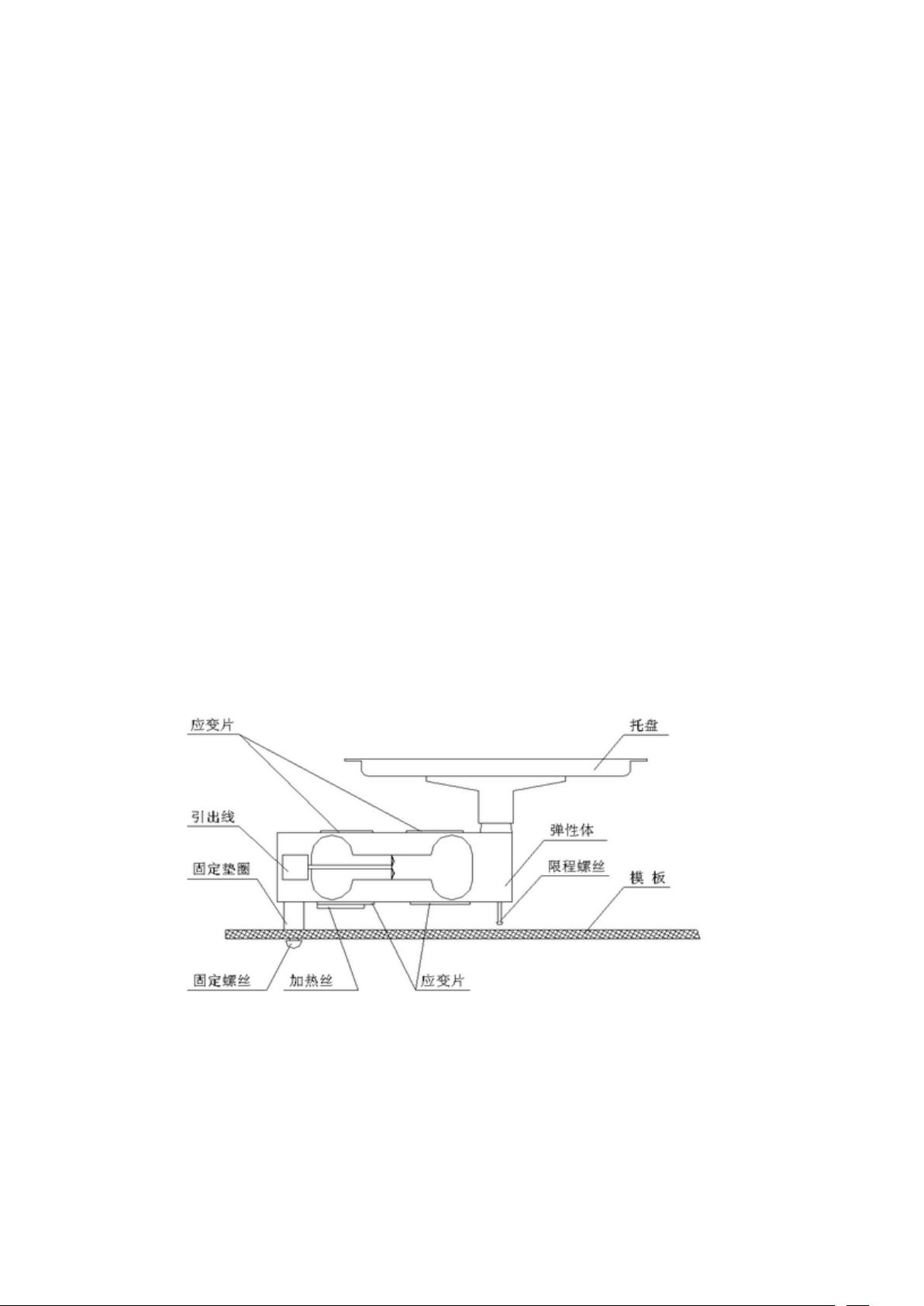
2.1 电阻应变式传感器的组成以及原理........................................2
2.2 直流差动电桥检测电路.................................................3
2.3 放大电路 ..............................................................5
2.4 A/D 转换 .............................................................6
2.5 单片机系统 ............................................................7
三、数据处理及程序的设计......................................................9
3.1 数据处理及程序的设计 ..................................................9
3.2 参数整定 .............................................................10
3.2.1 测量数据及误差分析 .................................................10
3.2.2 曲线拟合及参数整定 .................................................10
3.3 显示子程序的设计 .....................................................13
总结.........................................................................13
参考文献.....................................................................14
附录 1 程序...................................................................15