《基于52单片机的超声波测距仪全解》
超声波测距仪是一种广泛应用的技术,尤其在工业、安防以及机器人导航等领域。本文主要围绕基于52单片机的超声波测距仪展开,详细介绍其设计原理、硬件组成以及软件实现。
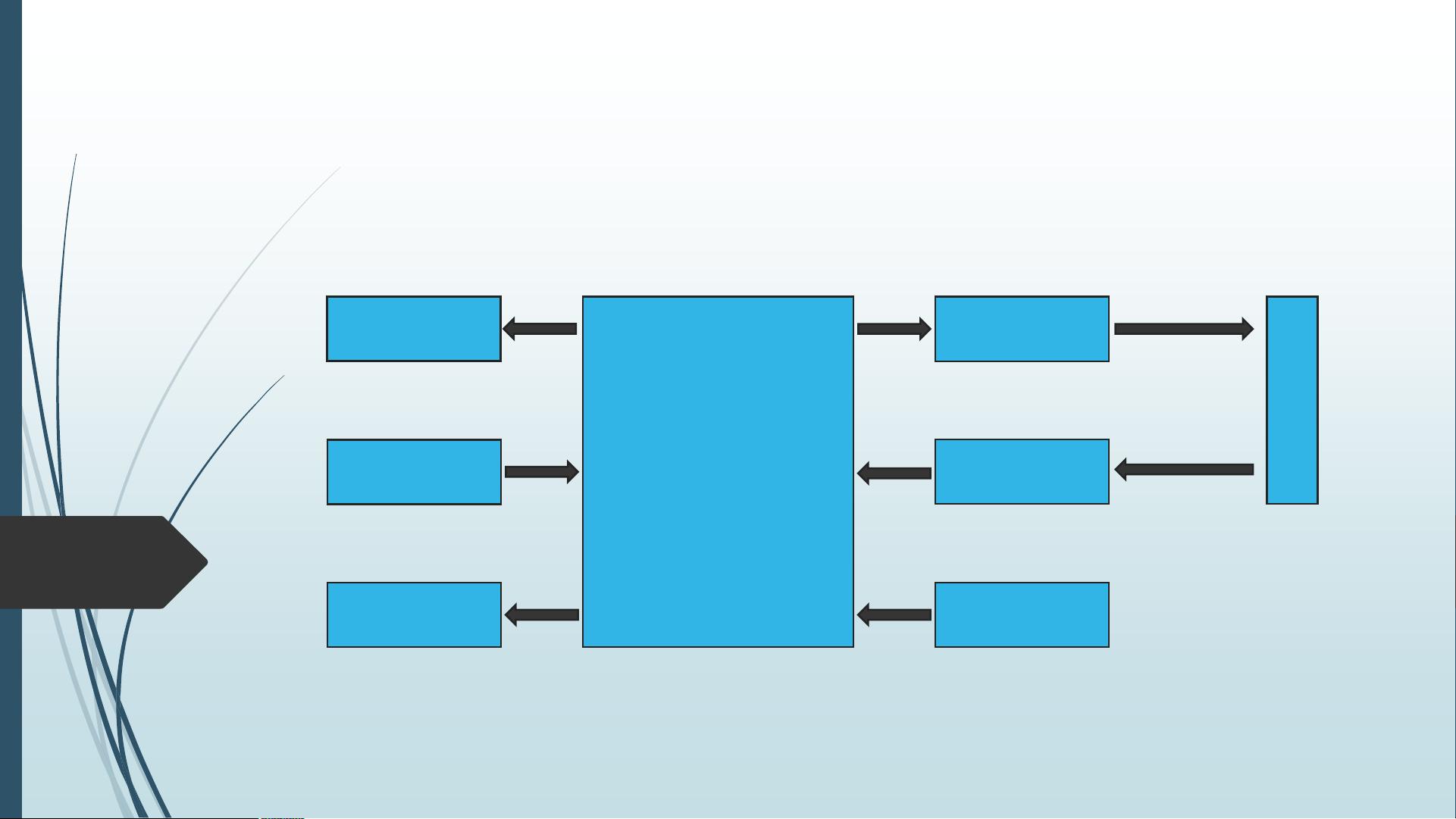
一、系统模块详解
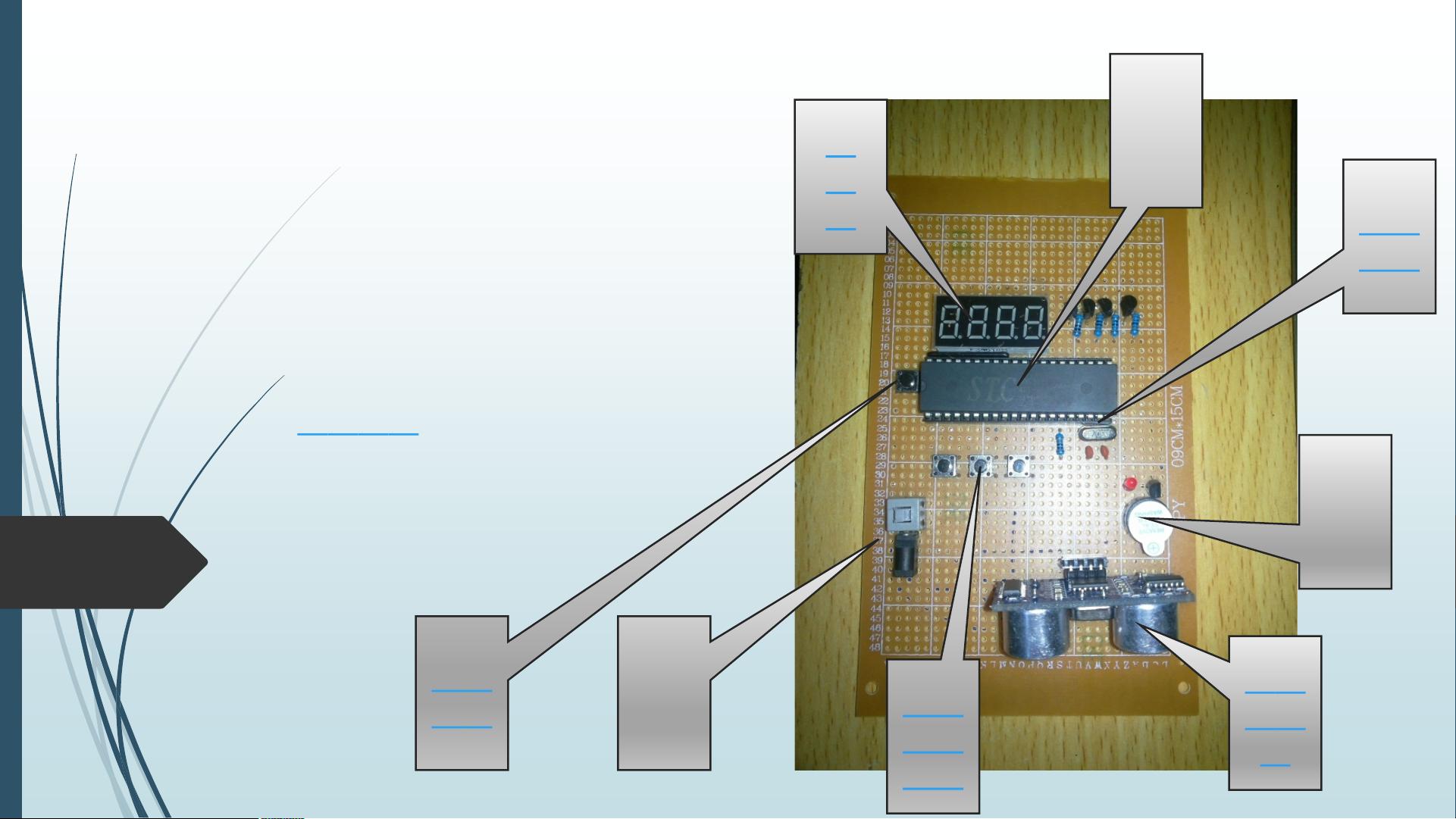
1. 控制单元:核心控制器选用STC89C52单片机,具备丰富的I/O口,便于连接各个模块。P0口作为低8位地址/数据复用口,P1、P2、P3则带有内部上拉电阻,其中P1.0和P1.2分别作为定时器的外部计数输入。
2. 时钟模块:使用12MHz晶振产生时钟信号,为单片机提供稳定的运行节拍。时钟电路有两种工作模式,本设计采用外部时钟方式。
3. 复位电路:手动复位设计,通过电容和电阻组合实现,确保RST引脚在高电平时执行复位操作。
4. 显示模块:采用四位共阳八段数码管,通过动态扫描方式显示距离,用PNP三极管驱动,同时设有小数点显示。
5. 报警模块:当检测到障碍物达到预设报警距离时,蜂鸣器驱动电路会启动报警。
6. 发射电路:通过P1.7口输出40kHz脉冲信号驱动超声波传感器发射超声波。
7. 接收电路:采用CX20106A接收回波信号,经过放大、滤波、检波和整形,输出到单片机的外部中断0。
二、测距算法与程序分析
超声波测距的基本原理是计算超声波往返时间来确定距离。程序流程主要包括:
1. 初始化系统,包括时钟、中断和发射超声波。
2. 打开外部中断,启动定时器,开始计时。
3. 超声波发生子程序通过P1.0发送脉冲,同时计数器T0计时。
4. 当接收到回波信号时,进入中断程序,关闭计时器并记录时间。
5. 计算距离(d = v * t / 2,v为声速,t为时间),并根据结果决定是否显示和报警。
三、误差来源与解决方案
1. 温度影响:声速随温度变化,需根据实时温度校正声速。
2. 抖动问题:发射端与接收端可能存在微小延迟,四角按键的抖动也需要处理,一般通过软件延时消除。
四、小结
基于52单片机的超声波测距仪设计中,精确的硬件设计和合理的软件编程是关键。系统需要考虑温度影响、按键抖动等因素,确保测量的准确性。通过这样的测距仪,可以实现对周围环境的实时、非接触式距离检测,具有广泛的应用前景。









评论0
最新资源