
2003年10月
1
2012-9-19 1
i
R
C
L
R
U
C
U
1
1
2
++
=
RCsLCsU
U
R
C
3-3 二阶系统分析
一、数学模型
2012-9-19 2
22
2
2)(
)(
nn
n
sssR
sC
ωξω
ω
++
=
n
ω
ξ
称为无阻尼自然频率或固有频率
称为阻尼比
可将上式表示为如下标准形式
R(s)
C(s)
_
)2(
2
n
n
ss
ξω
ω
+
2012-9-19 3
二、单位阶跃响应
sss
sRssC
nn
n
1
2
)()()(
22
2
•
++
=•Φ=
ωξω
ω
特征方程:
02
22
=++
nn
ss
ωξω
特征方程的根
1
2
2,1
−±−=
ξωξω
nn
s
0=
ξ
称为零阻尼
n
js
ω
±=
2,1
0<
ξ
称为负阻尼,系统出现正实部特征根
二阶系统的稳定工作条件为:
0>
ξ
2012-9-19 4
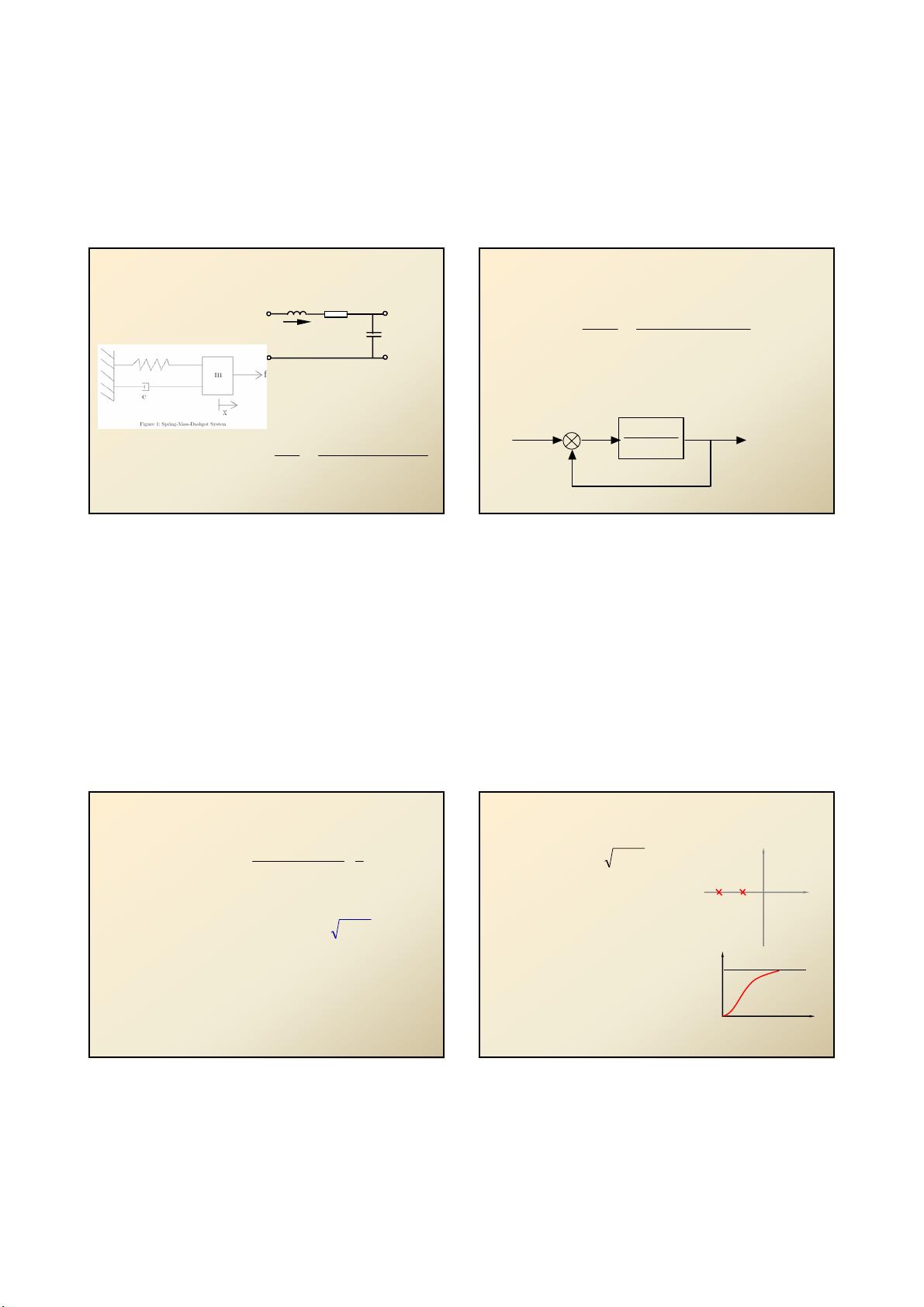
1、过阻尼
)1( >
ξ
1
2
2,1
−±−=
ξωξω
nn
s
*为两个不等负实根
1
S
2
S
ω
j
σ
0
*可以看成两个惯性环节的串联
*响应非振荡
*系统不存在稳态误差
0
t
h(t)
1
资源评论


智慧安全方案
- 粉丝: 3842
- 资源: 59万+









最新资源
- 【未发表】基于遗传算法GA优化集成学习结合鲁棒极限学习机RELM-Adaboost实现负荷数据回归预测算法研究附Matlab代码.rar
- 【未发表】基于蚁狮优化算法ALO优化宽度学习BLS实现光伏数据预测算法研究附Matlab代码.rar
- 【未发表】基于蚁狮优化算法ALO优化集成学习结合鲁棒极限学习机RELM-Adaboost实现负荷数据回归预测算法研究附Matlab代码.rar
- 【未发表】基于蚁狮优化算法ALO优化集成学习结合核极限学习机KELM-Adaboost实现风电数据时序预测算法研究附Matlab代码.rar
- 【未发表】基于蚁狮优化算法ALO优化鲁棒极限学习机RELM实现负荷数据回归预测算法研究附Matlab代码.rar
- 【未发表】基于引力搜索优化算法GSA优化集成学习结合鲁棒极限学习机RELM-Adaboost实现负荷数据回归预测算法研究附Matlab代码.rar
- 【未发表】基于引力搜索优化算法GSA优化集成学习结合核极限学习机KELM-Adaboost实现风电数据时序预测算法研究附Matlab代码.rar
- 【未发表】基于引力搜索优化算法GSA优化鲁棒极限学习机RELM实现负荷数据回归预测算法研究附Matlab代码.rar
- 【未发表】基于引力搜索优化算法GSA优化宽度学习BLS实现光伏数据预测算法研究附Matlab代码.rar
- 【未发表】基于鱼鹰优化算法OOA优化集成学习结合核极限学习机KELM-Adaboost实现风电数据时序预测算法研究附Matlab代码.rar
- 【未发表】基于鱼鹰优化算法OOA优化鲁棒极限学习机RELM实现负荷数据回归预测算法研究附Matlab代码.rar
- 【未发表】基于鱼鹰优化算法OOA优化宽度学习BLS实现光伏数据预测算法研究附Matlab代码.rar
- 【未发表】基于鱼鹰优化算法OOA优化集成学习结合鲁棒极限学习机RELM-Adaboost实现负荷数据回归预测算法研究附Matlab代码.rar
- 【未发表】基于侏儒猫鼬优化算法IDMO优化宽度学习BLS实现光伏数据预测算法研究附Matlab代码.rar
- 【未发表】基于侏儒猫鼬优化算法IDMO优化集成学习结合鲁棒极限学习机RELM-Adaboost实现负荷数据回归预测算法研究附Matlab代码.rar
- 【未发表】基于侏儒猫鼬优化算法IDMO优化集成学习结合核极限学习机KELM-Adaboost实现风电数据时序预测算法研究附Matlab代码.rar
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


