基于机器视觉的工件智能抓取技术研究报告.doc
版权申诉
90 浏览量
2021-11-26
18:00:56
上传
评论
收藏 1.29MB DOC 举报


.
.
. .jz.
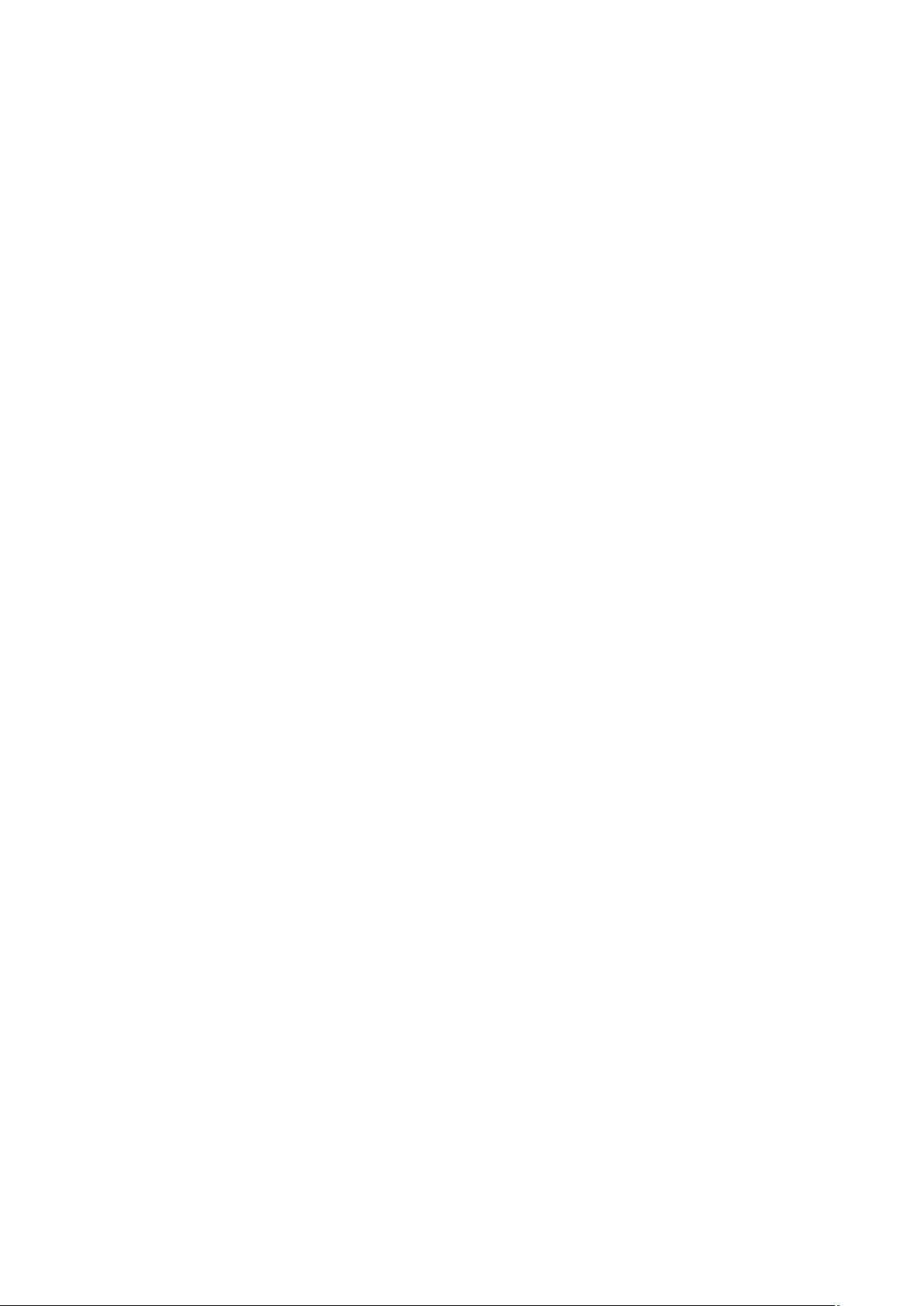
基于机器视觉的工业机器人工件搬运技术研究
1.1 研究背景
自 19 世纪 60 年代问世以来,工业机器人不断开展和完善,现已得到广泛应用,机
器人产业也逐渐成熟
[ ]
1
。目前,全世界已拥有 100 多万台工业机器人广泛应用在焊接、搬
运、装配、喷涂、修边、拾料、包装、堆垛和上下料等单调或复杂的作业中,为企业节约了
大量的劳动本钱,大大提高了劳动生产率。工业机器人是面向工业领域的多关节机械手或多
自由度的机器人,它在稳定产品品质、提高生产效率和改善劳动条件等方面有着十分重要的
作用,它的应用能够使企业大大缩短新产品的换产周期和节约劳动本钱,从而提高了产品的
市场竞争力
[ ]
2 3-
。
随着当代工业革命深入开展,工业生产日益趋向自动化,工业机器人技术也正朝着智能、
柔性的方向开展。许多兴旺国家对于智能工业机器人的研究都较为重视,我国也早已将其纳
入国家高科技开展规划。国家层面的重视也必将给工业机器人技术带来新的跨越式开展,机
器人的开展也必将对社会经济和生产力的发产生更加深远的影响
1.2 研究目的和意义
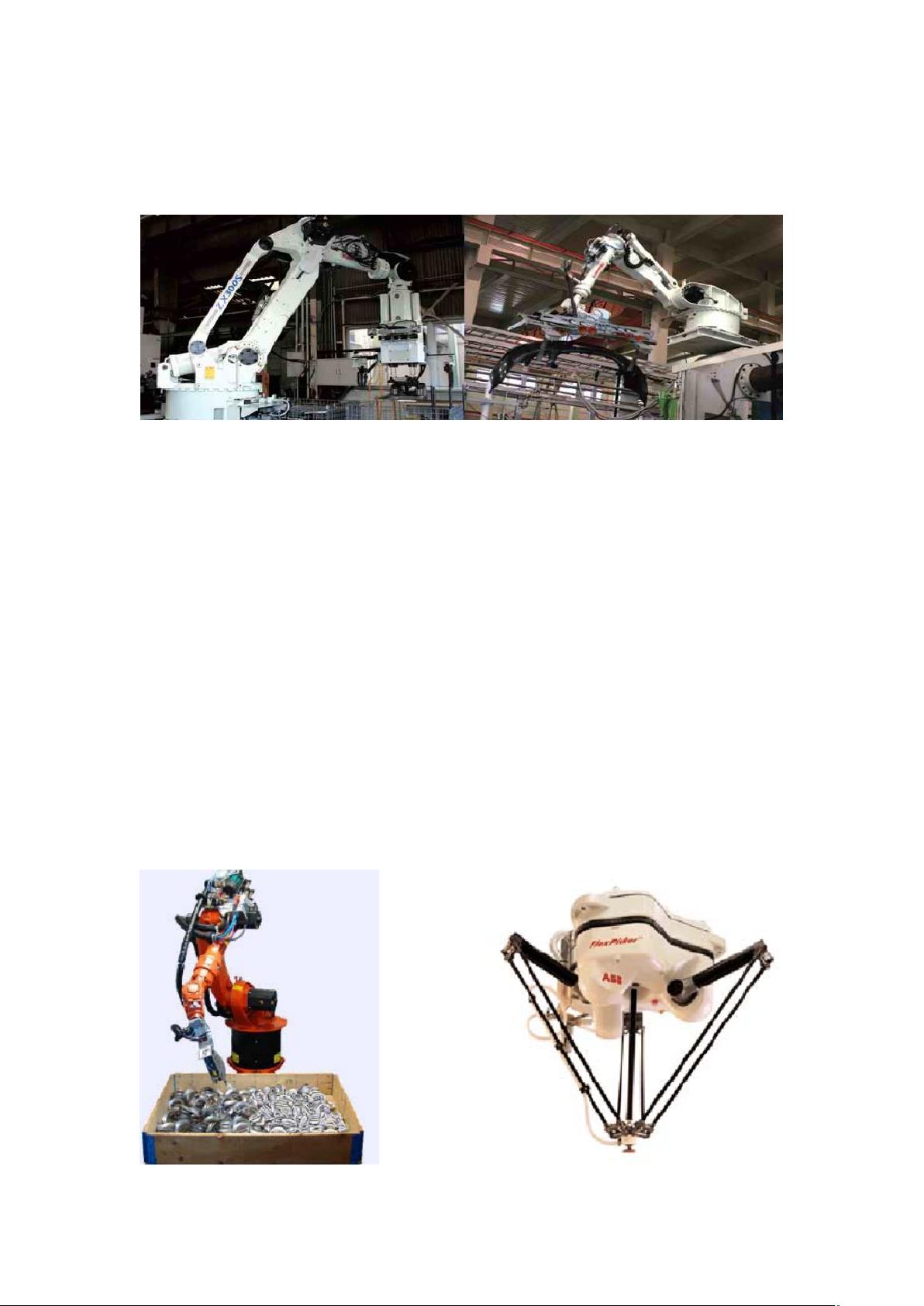
对于工作在自动化生产线上或柔性制造系统中的工业机器人来说,其完成最多的一类操
作是“抓取—放置〞动作,比方流水线上的工件搬运、装配以及各工位之间的工件转移和上
下料。机器人要完成这类操作是经过复杂计算的:首先,机器人必须知道怎么抓,其次机器
人应该知道怎么放;同时在这个过程还要伴随着机器人运动学分析的过程。传统的工业机器
人完成这类操作,必须经过准确的逐点示教后,才能一步一步的按照固定程序执行。在这个


剩余23页未读,继续阅读
资源评论













