

智能卡尔曼滤波跟踪机动目标
摘要:卡尔曼滤波(
KF
)的已被广泛应用于目标状态估计,但以机动状态
存在时,其性能可能会受到严重影响,因为移动可以表现为加在目标模型上的
大量的噪声而且过程噪声方差掩盖不了它。为了解决这个问题,文章提出了一
种新型智能
KF
(
IKF
)可以跟踪机动目标。未知的目标加速度被视为添加的过
程噪声,而整个过程噪声的时变方差是在智能模糊系统中近似计算的。为了优
化模糊系统,遗传算法(
GA
)或
DNA
编码方法可以利用,根据使用的这些优
化方法,我们称这种滤波器为基于遗传算法的
IKF
或基于
DNA
编码的
IKF
。这
种
IKF
利用一个滤波器就可以有效对付机动目标而且可以放宽常规机动目标跟
踪方法的额外要求。在计算机仿真中文章利用多模型方法比较了它的性能。
1.
介绍
卡尔曼滤波(
KF
法)已被广泛认为是追踪滤波器,用来估计有近匀速运动的
目标状态。然而,当打开或采取机动规避动作时,标准的
KF
就不适用了,因
为机动目标未知的加速度表现为加在目标模型上的大规模过程噪声,原有的过
程噪声方差掩盖不了它。作为第一个尝试解决这个问题,辛格提出的目标跟踪
模式中,机动被假设为与时间相关的一阶马尔可夫过程
[1]
。最近的研究已经大
致分为两种主要方法。一种方法是先检测机动,然后再来有效处理。这种方法
的例子包括输入估计(
IE
)的技术
[2-4]
,变维(
VD
)滤波器
[5]
,两阶段卡尔
曼估计
[6]
。除了基本的滤波计算,这些技术还需要额外的努力如估计和侦测加
速度,以及对状态估计或非机动滤波器和机动滤波器之间的过渡进行补偿,以
应付未知的机动目标。另一种方法是使用多个子滤波器来描述目标的运动。广
义伪贝叶斯(
GPB
)方法
[7]
,交互多模型(
IMM
)方法
[8
,
9]
,自适应交互多
模型(
AIMM
)方法
[10]
都属于这一类方法。这些技术也需要诸如预先定义多个
子过滤器和更新模型转移概率的额外努力,以及使用多个子滤波器带来的庞大
计算负荷。到现在为止,还没有提出一个简单的方法来处理机动目标。
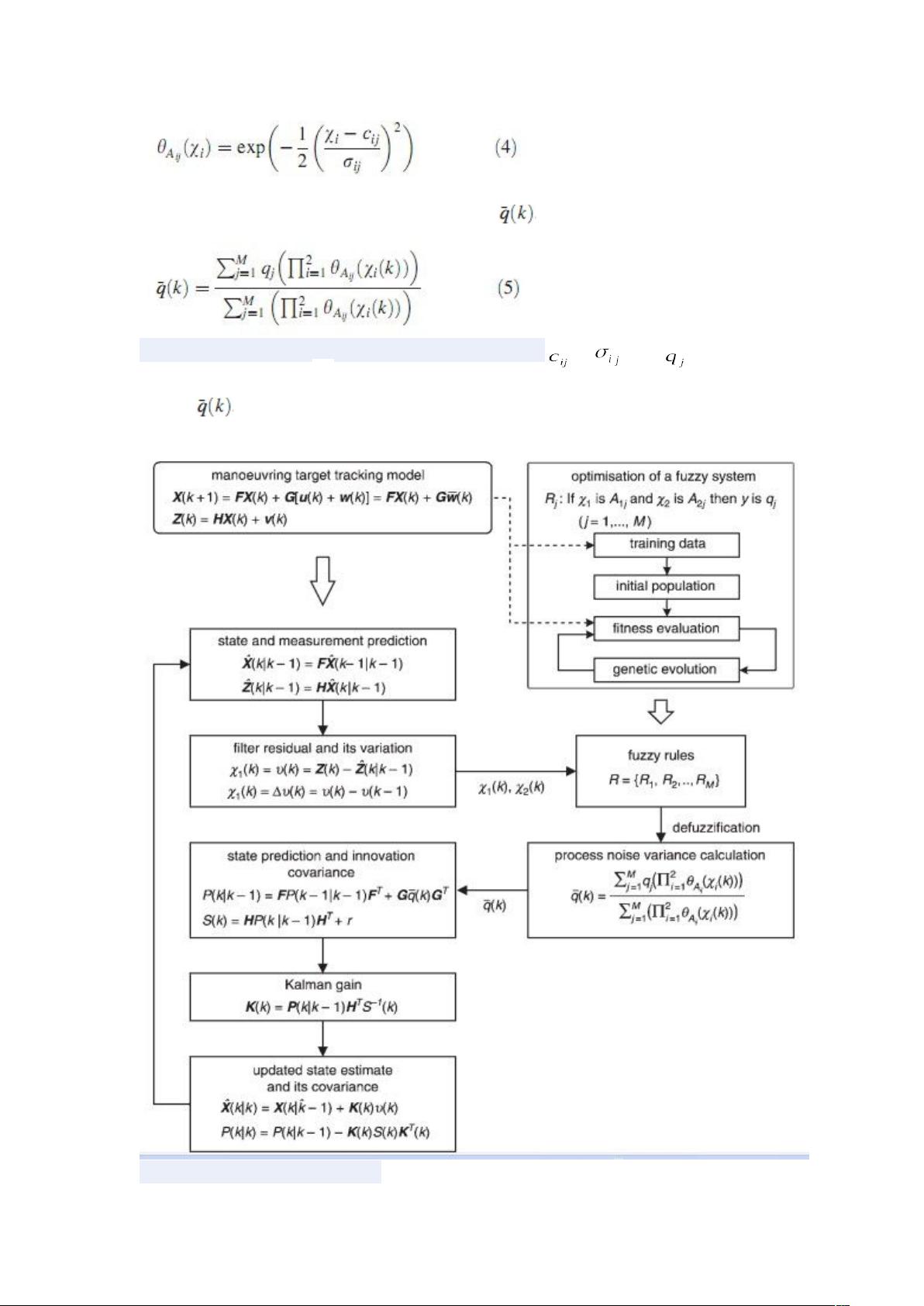
在本文中,我们提出了一个智能的卡尔曼滤波法(
IKF
),它可以减少传统
方法中所需的额外努力,提高跟踪性能,并建立一个简单的机动目标跟踪程序。
在
IKF
方法中,未知机动目标的加速度被视为额外的过程噪声。当目标运动时,
KF
的余差会随着运动的大小成比例的增加。因此,整个过程的噪声方差可以由
余差和它在每个采样瞬间的变化确定,所以我们可以通过调整过程噪声方差来
应付目标机动。然而,未知的加速度造成了过程噪声方差随时间变化,而且可
能是非线性的,很难去相应的逼近。为了减轻这些困难,我们利用一个模糊系
统。它的基本思想源于这样一个事实:模糊系统可以良好的逼近未知或任意高
度非线性系统
[11
,
12]
。众所周知,模糊系统对于数学关系复杂,不确定,不
明确的动态行为是非常有效的,但是这个领域的专家定性知识是可以获得的,
在这种情况下,可用来近似
IKF
的时变过程噪声方差。
此外,为优化模糊系统
使其能在实际目标的加速度范围内工作,我们利用遗传算法(
GA
)和
DNA
的
编码方法
[13-15]
。根据优化使用的工具不同,
IKF
被分别命名为基于遗传算法
的
IKF
和基于
DNA
编码的
IKF
。
GA
和
DNA
的编码方法已经证明是许多复杂
的非线性优化问题灵活而强大的优化工具,我们认为这类问题的可调参数以及
相关的目标函数之间的关系往往是存在的,但其数学关系却不清楚。
2
.智能卡尔曼滤波
剩余13页未读,继续阅读
资源评论

 zhongrui19842014-03-25还好吧,一篇经过翻译的智能卡拉曼滤波的文献
zhongrui19842014-03-25还好吧,一篇经过翻译的智能卡拉曼滤波的文献 偶然相伴2012-10-15卡尔曼智能滤波,方法效率高
偶然相伴2012-10-15卡尔曼智能滤波,方法效率高- JACKWANG122013-10-29还不错,可以参考参考。。
yangyanliu2012
- 粉丝: 0
- 资源: 1









最新资源
- 使用C++实现的常见算法
- travel-web-springboot【程序员VIP专用】.zip
- 基于Matlab, ConvergeCase中部分2D结果文件输出至EXCEL中 能力有限,代码和功能极其简陋.zip
- java桌面小程序,主要为游戏.zip学习资源
- Java桌面-坦克大战小游戏.zip程序资源
- java语言做的魔板小游戏.zip
- 初学JAVA制作的坦克大战小游戏,使用JAVA 的GUI模拟2,5D界面.zip
- 公开整理-2024年832个国家级贫困县摘帽情况分省分年统计.xlsx
- 纯js+Jquery实现2048游戏
- 叠罗汉游戏,安卓java实现,自定义Framlayout,属性动画.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


