
L297
L297D
STEPPER MOTOR CONTROLLERS
NORMAL/WAWE DRIVE
HALF/FULL STEP MODES
CLOCKWISE/ANTICLOCKWISE DIRECTION
SWITCHMODE LOAD CURRENT REGULA-
TION
PROGRAMMABLE LOAD CURRENT
FEW EXTERNAL COMPONENTS
RESET INPUT & HOME OUTPUT
ENABLE INPUT
DESCRIPTION
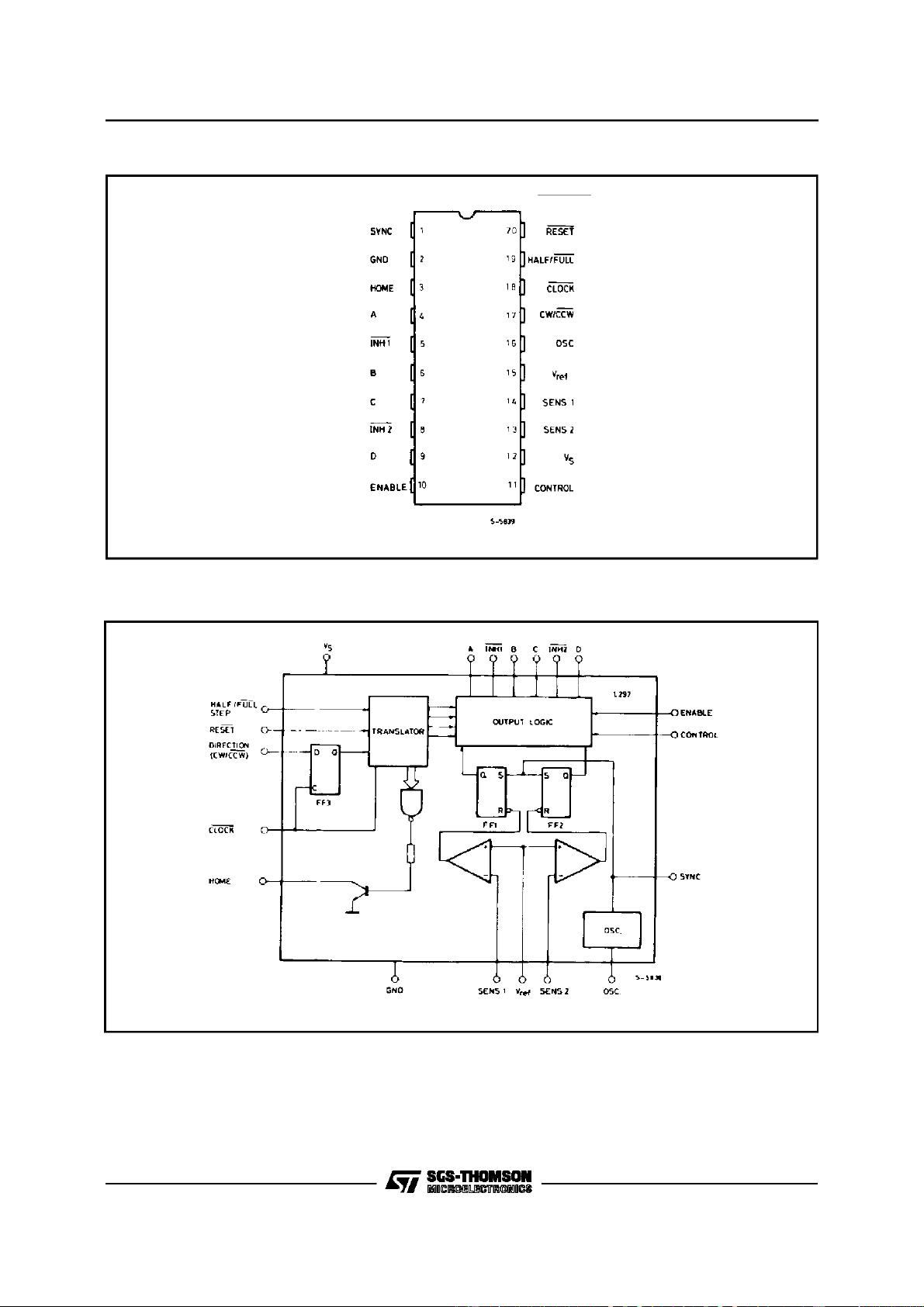
The L297/A/D Stepper Motor Controller IC gener-
ates four phase drive signals for two phase bipolar
and four phase unipolar step motors in microcom-
puter-controlled applications. The motor can be
driven in half step, normal and wawe drive modes
and on-chip PWM chopper circuits permit switch-
mode control of the current in the windings. A
August 1996
Symbol Parameter Value Unit
V
s
Supply voltage 10 V
V
i
Input signals 7V
P
tot
Total power dissipation (T
amb
=70
°
C) 1 W
T
stg
,T
j
Storage and junction temperature -40 to + 150 °
C
ABSOLUTE MAXIMUM RATINGS
feature of this device is that it requires only clock,
direction and mode input signals.Since the phase
are generated internally the burden on the micro-
processor,andtheprogrammer,is greatlyreduced.
Mounted in DIP20 and SO20 packages, the L297
can be used with monolithic bridge drives such as
the L298N or L293E, or with discrete transistors
and darlingtons.
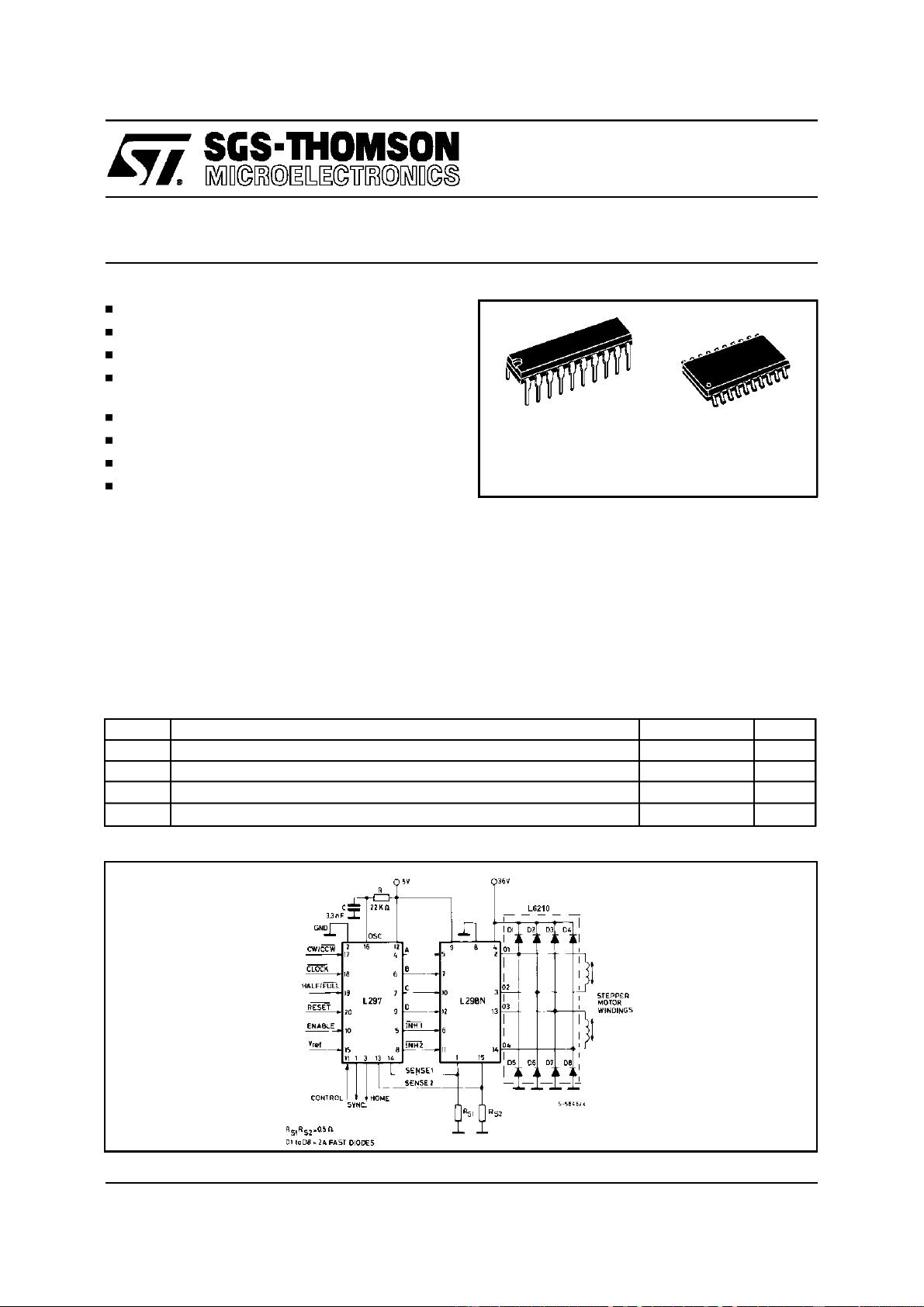
TWO PHASE BIPOLAR STEPPER MOTOR CONTROL CIRCUIT
DIP20 SO20
ORDERING NUMBERS
: L297 (DIP20)
L297D (SO20)
1/11
剩余10页未读,继续阅读
资源评论


yangjitaoyjt
- 粉丝: 2
- 资源: 15









最新资源
- (源码)基于ESP8266和Arduino的HomeMatic水表读数系统.zip
- (源码)基于Django和OpenCV的智能车视频处理系统.zip
- (源码)基于ESP8266的WebDAV服务器与3D打印机管理系统.zip
- (源码)基于Nio实现的Mycat 2.0数据库代理系统.zip
- (源码)基于Java的高校学生就业管理系统.zip
- (源码)基于Spring Boot框架的博客系统.zip
- (源码)基于Spring Boot框架的博客管理系统.zip
- (源码)基于ESP8266和Blynk的IR设备控制系统.zip
- (源码)基于Java和JSP的校园论坛系统.zip
- (源码)基于ROS Kinetic框架的AGV激光雷达导航与SLAM系统.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


