

Arbitrary-steps Image Super-resolution via Diffusion Inversion
Zongsheng Yue, Kang Liao, Chen Change Loy
S-Lab, Nanyang Technological University
{zongsheng.yue, kang.liao, ccloy}@ntu.edu.sg
DiffBIR-50 (7937ms)
Ours-2 (149ms)
DiffBIR-50
Ours-2
ResShift-4 (319ms)
Ours-3 (176ms)
ResShift-4
Ours-3
SinSR-1 (138ms)
Ours-4 (207ms)
SinSR-1
Ours-4
OSEDiff-1 (176ms)
Ours-5 (244ms)
OSEDiff-1
Ours-5
StableSR-50 (3459ms)
Ours-1 (117ms)
StableSR-50
Ours-1
Zoomed LR
Zoomed LR
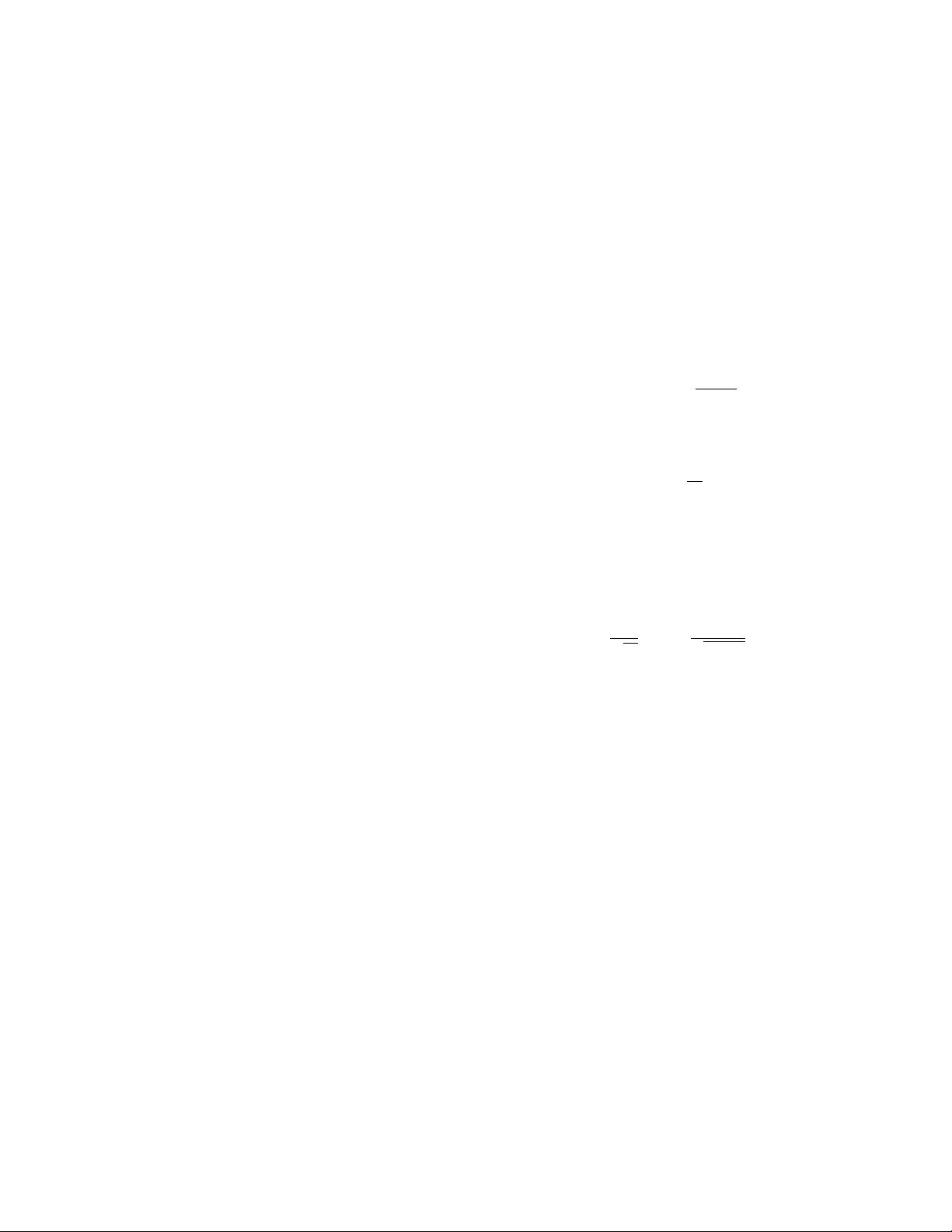
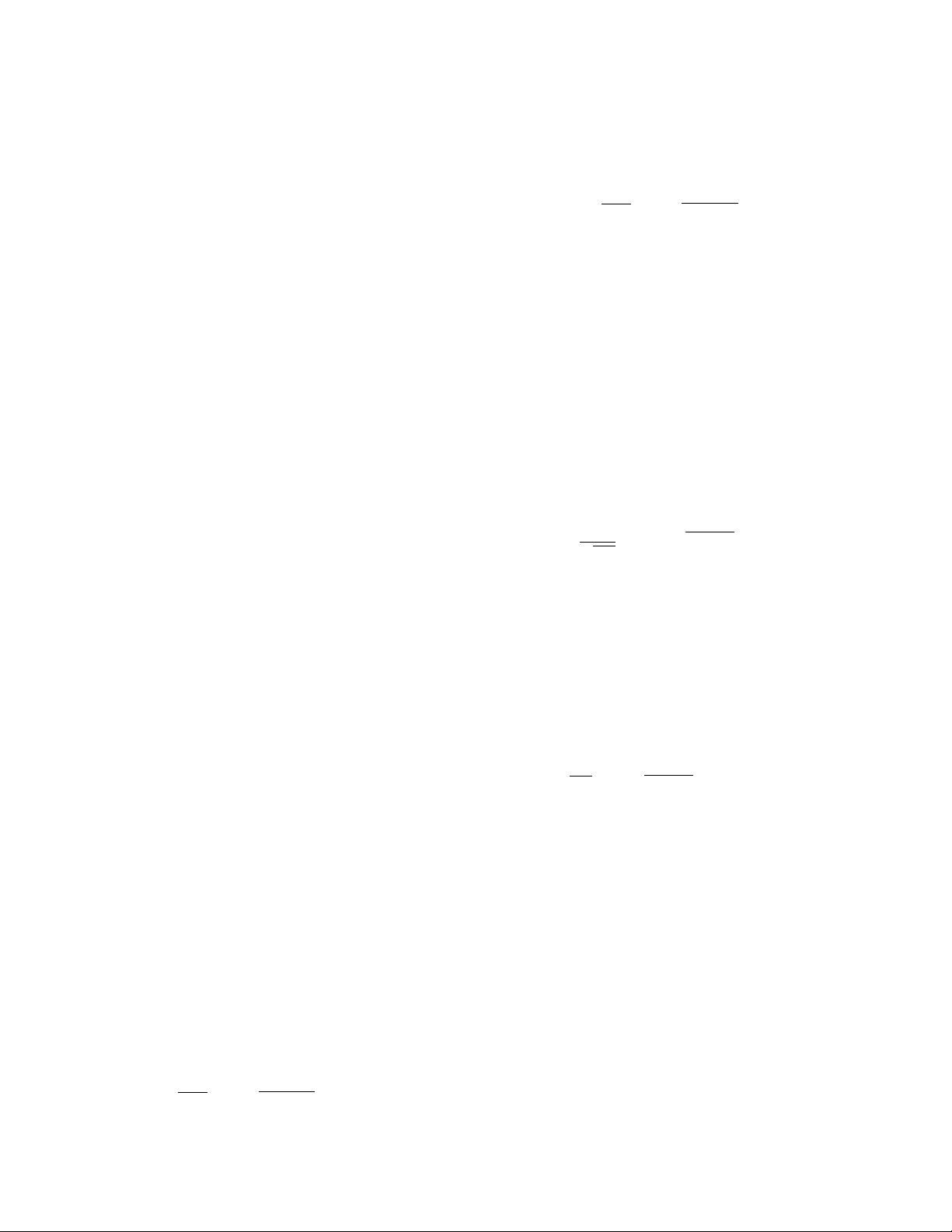
Figure 1. Qualitative comparisons of our proposed method to recent state-of-the-art diffusion-based approaches on two real-world ex-
amples, where the number of sampling steps is annotated in the format “Method name-Steps”. We provide the runtime (in milliseconds)
highlighted by red in the sub-caption of the first example , which is tested on ×4 (128 → 512) SR task on an A100 GPU. Our method
offers an efficient and flexible sampling mechanism, allowing users to freely adjust the number of sampling steps based on the degradation
type or their specific requirements. In the first example, mainly degraded by blurriness, multi-step sampling is preferable to single-step
sampling as it progressively recovers finer details. Conversely, in the second example with severe noise, a single sampling step is sufficient
to achieve satisfactory results, whereas additional steps may amplify the noise and introduce unwanted artifacts. (Zoom-in for best view)
Abstract
This study presents a new image super-resolution (SR) tech-
nique based on diffusion inversion, aiming at harnessing
the rich image priors encapsulated in large pre-trained
diffusion models to improve SR performance. We design
a Partial noise Prediction strategy to construct an inter-
mediate state of the diffusion model, which serves as the
starting sampling point. Central to our approach is a
deep noise predictor to estimate the optimal noise maps
for the forward diffusion process. Once trained, this noise
predictor can be used to initialize the sampling process
partially along the diffusion trajectory, generating the de-
sirable high-resolution result. Compared to existing ap-
proaches, our method offers a flexible and efficient sam-
pling mechanism that supports an arbitrary number of sam-
pling steps, ranging from one to five. Even with a single
sampling step, our method demonstrates superior or com-
parable performance to recent state-of-the-art approaches.
The code and model are publicly available at https:
//github.com/zsyOAOA/InvSR.
1
arXiv:2412.09013v1 [cs.CV] 12 Dec 2024

剩余15页未读,继续阅读
资源评论


码流怪侠
- 粉丝: 3w+
- 资源: 651









最新资源
- 嵌入式开发_ARM_入门_STM32迁移学习_1741139876.zip
- 嵌入式系统_STM32_自定义Bootloader_教程_1741142157.zip
- 文章上所说的串口助手,工程文件
- 斑马打印机zpl官方指令集
- 《实验二 面向对象编程》
- 《JavaScript项目式实例教程》项目五多窗体注册页面窗口对象.ppt
- Web前端开发中Vue.js组件化的应用详解
- labelme已打包EXE文件
- 一文读懂Redis之单机模式搭建
- Vue综合案例:组件化开发
- 《SolidWorks建模实例教程》第6章工程图及实例详解.ppt
- C语言基础试题.pdf
- Go语言、数据库、缓存与分布式系统核心技术要点及面试问答详解
- 7天精通DeepSeek实操手册.pdf
- DeepSeek R1 Distill 全版本安全评估.pdf
- DeepSeek 零基础入门手册.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


