
第 2 章 平面连杆机构的运动分析和动态静力分析
为了适应现代技术的发展,机械原理课程设计方法应由传统的图解法转向以解析法为主,以计算机
为主要设计手段。目前,机械原理教材中对图解法没有详细的论述。为了进行使学生能够熟练地应用解
析法,有必要编制一些常用机构分析与设计的应用子程序。
本指导教程主要有平面连杆机构运动分析、凸轮机构设计标准函数使用方法和实例,供课程设计使
用。所用编程语言为目前流行的数学计算软件-MATLAB,因此,要求学生必须具有 MATLAB 基本运算和
编程基础。考虑到目前有关 MATLAB的参考书较多,本书不再作详细的讲解。
本教程中在平面连杆机构运动分析和动态分析,凸轮机构分析和设计中都应用了复数矢量法,为了
便于学生理解、应用这一方法解决机械分析和设计问题,此处对复数矢量法的一些基本知识和运算方法
作一简单介绍。
2.1 复数矢量的基本知识
解析法对平面机构运动分析和设计的方法很多,目前国内教材中经常应用的有矩阵法、杆组法和矢
量方程法等。根据相关文献的介绍,采用复数矢量方程是解决机构运动学问题的最简单有效的方法,尤
其是平面问题。为了便于理解和应用,这里对复数矢量的一些知识以及复数矢量在 MATLAB 中的运算方
法作一简单介绍。
2.1.1 平面矢量的复数表达式
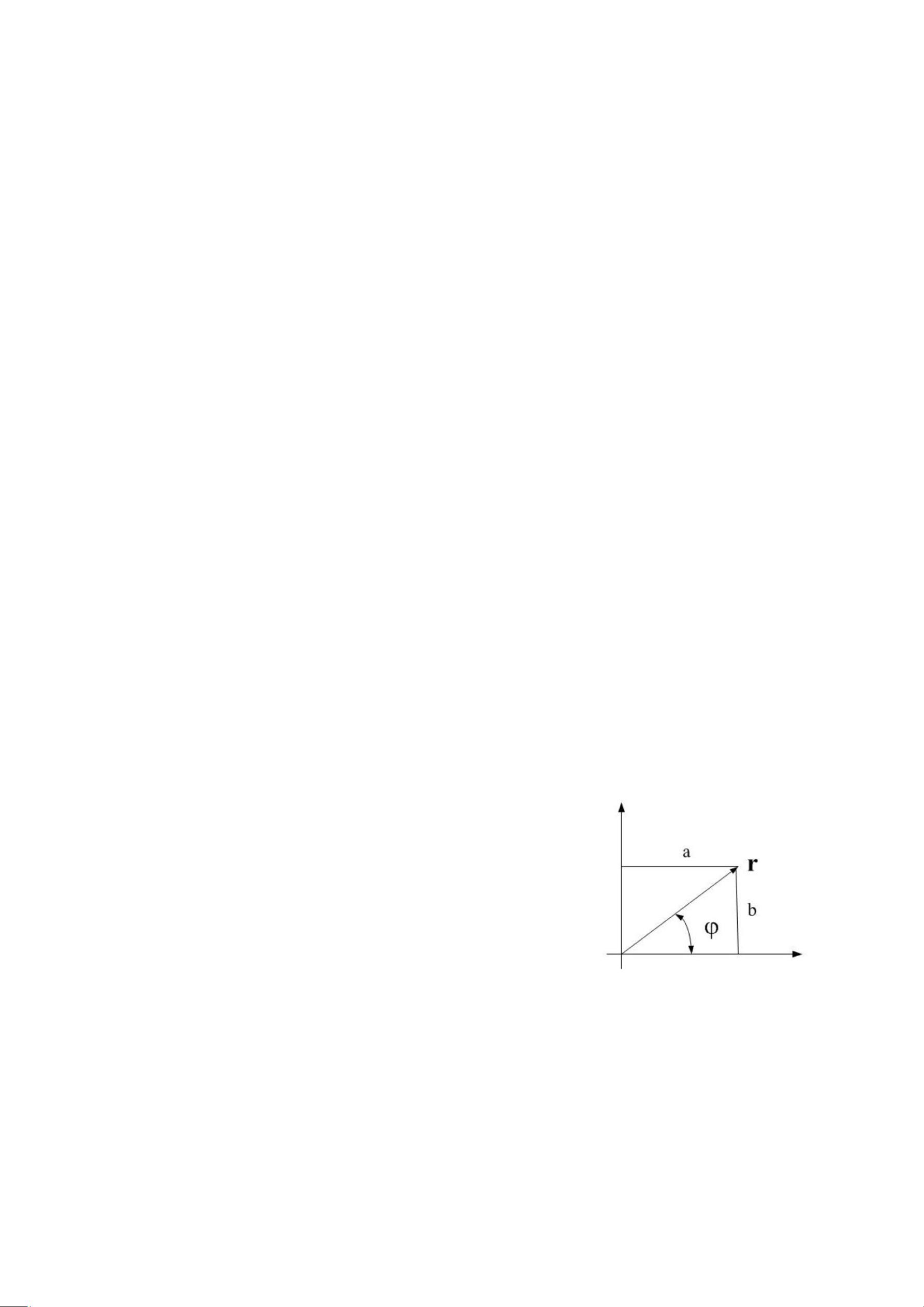
设矢量 A 在坐标轴 x、y 上的投影为 a、b(图 2-1),模为 r,幅角为,以弧度表示。则矢量r 可表
达成复数形式
a bi
r r.e
i
r
或
上式也可以表示 A 点在坐标轴上的位置,在速度和加速度分析中可用来表示某一点的速度、加速度
矢量。
对于一个矢量,若 a=3,b=4,在 MATALAB中其表达式为
r=3+4*i
或 r=5*exp(0.34*i)
2.1.2 矢量的运算
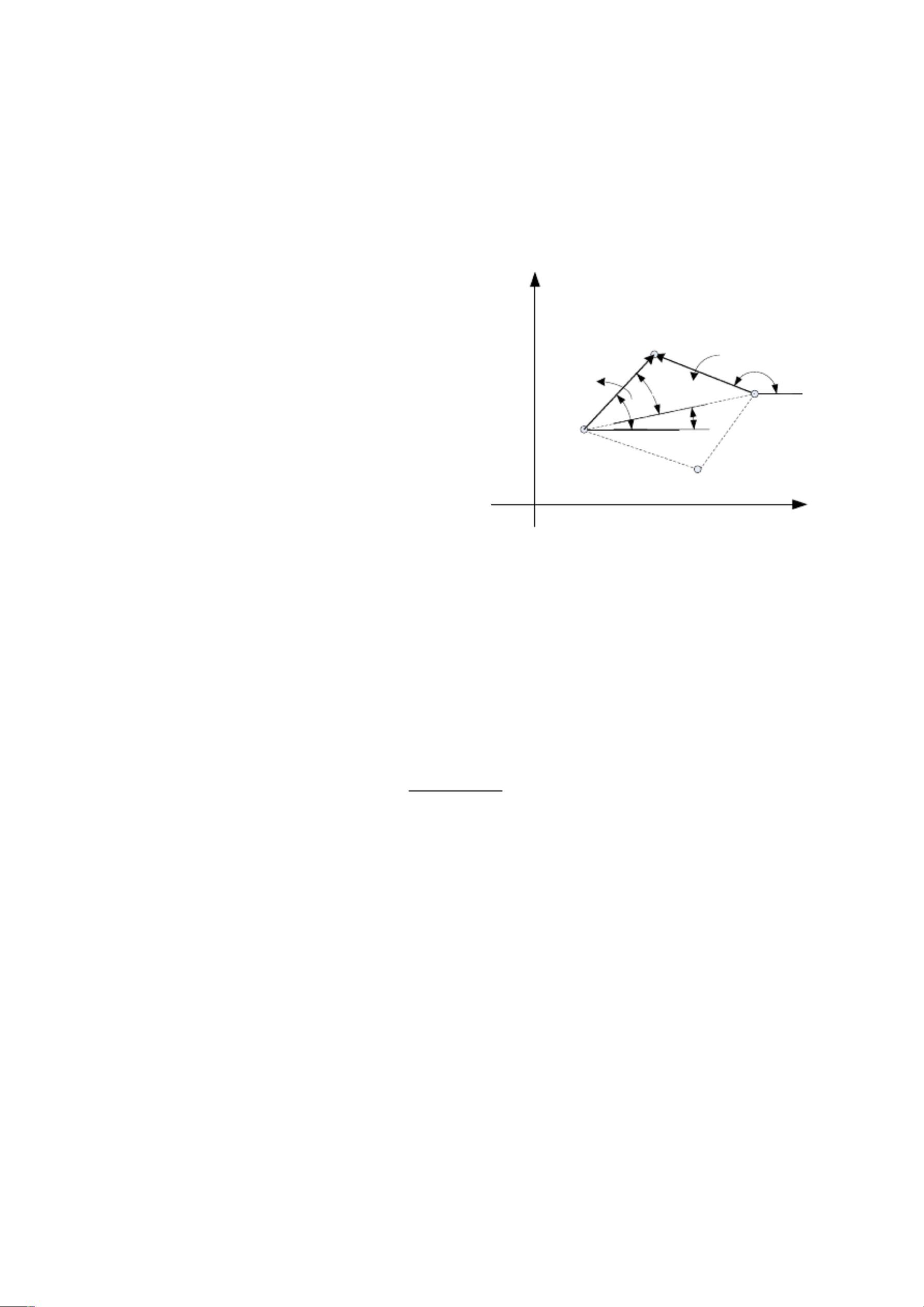
矢量的加(减):两个矢量的加(减)法运算是它们的实部和虚
部分别相加(减)。
a b i
r a b i
若 r
,
1
1
1
2
2
2
r r (a a ) (b b )i
则 r
1
2
1
2
1
2
图 2-1
在 MATLAB中的表达式为:
r1=a1+b1*i; r2=a2+b2i; r=r1+r2;
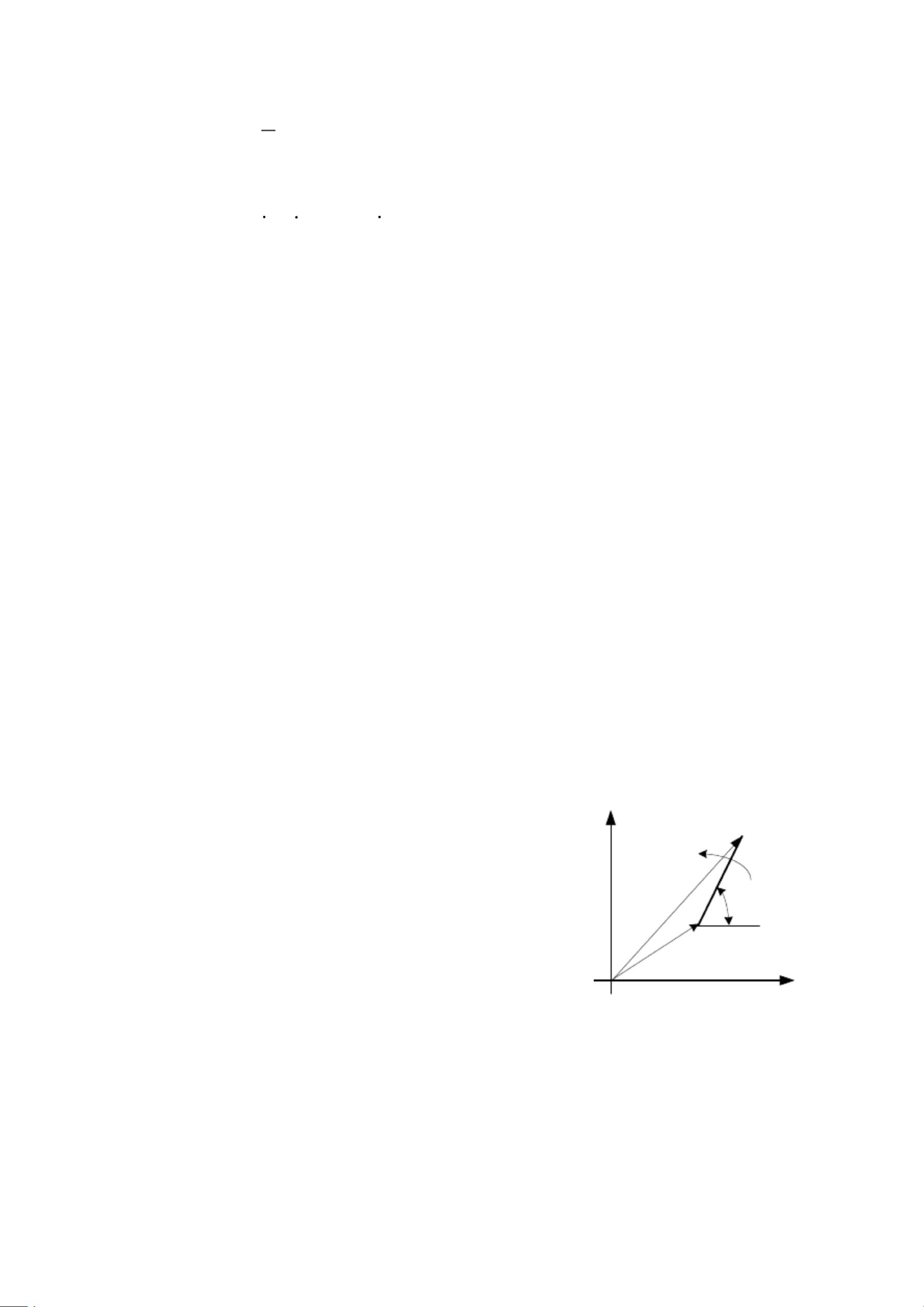
矢量的乘积和商:两矢量r 和 的乘积是将第一个矢量伸长r 倍,再转动 角度而得到的。
r
1
2
2
2
r.e
r r .e
若 r
,
;
2
i
1
i
1
1
2
2
r r rr .e
则, r
( ) ;
1 2
i
1
2
1 2
剩余24页未读,继续阅读
资源评论













